

В последние годы различные формы прыгающих роботов получили значительное внимание в разработке для использования в различных миссиях по исследованию космоса. Их уже задействовали в миссиях на астероидах и на Луне. Однако исследование, финансируемое Институтом передовых концепций NASA (NIAC) в 2018 году, планировало миссию на космическое тело, где прыжки могут быть не столь очевидным преимуществом — Европу.
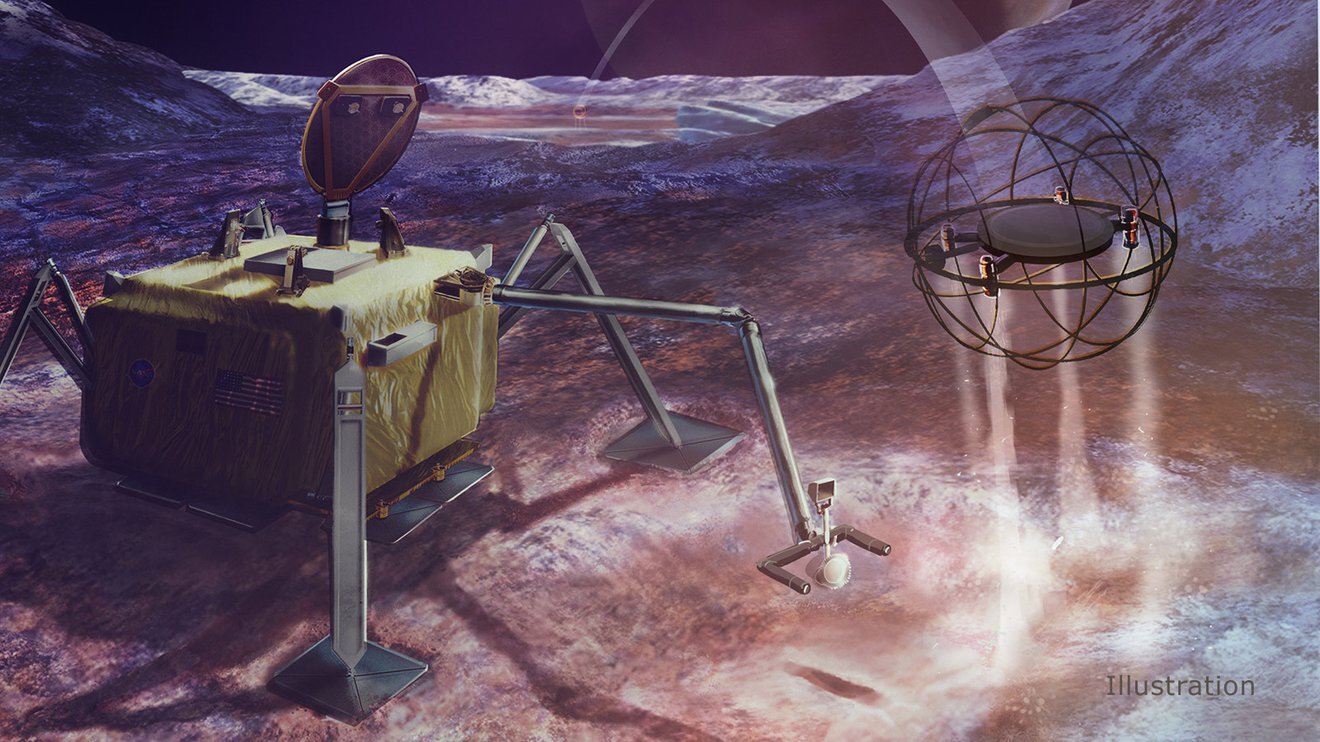
Миссия, разработанная инженерами Лаборатории реактивного движения NASA, Университета Пердью и Honeybee Robotics, известна как SPARROW. Он имеет размер и форму футбольного мяча, с электроникой, питанием и системами управления внутри сферической оболочки.
Однако SPARROW не сможет работать самостоятельно. Для его посадки на поверхность и использования в качестве базы для дозаправки и хранения образцов потребуется посадочный модуль. Europa Clipper, единственная в настоящее время запланированная миссия NASA на ледяную луну Юпитера, была бы подходящим зондом, но отсутствие посадочного модуля делает её непригодной для SPARROW.
Однако сам прыгающий робот хорошо подходит для среды Европы. Его конструкторы намеревались сделать его «независимым от местности», то есть он мог бы пересекать даже самые сложные ландшафты. К ним относятся пенитентес (тонкие ледяные колья), осколки льда, которые могут достигать метров в высоту и которые трудно преодолеть существующим роботам, которые находят применение на Земле.
SPARROW мог бы пролететь над ними, собрать ценные образцы и вернуться на посадочный модуль, чтобы дозаправиться и оставить образцы. Затем он мог бы снова отправиться на Европу для дальнейших исследований. Чтобы смоделировать архитектуру системы, команда JPL провела Фазу I, пытаясь определить лучшую двигательную систему для робота и смоделировать алгоритмы управления для полетов.
Посадочный модуль, сопровождающий SPARROW, должен будет добывать лед с поверхности спутника, затем нагревать его и хранить в виде воды. Когда SPARROW вернётся на модуль, он будет использовать для дозаправки именно воду.
В рамках исследования рассматривалось пять различных методов движения. Лучшим оказался «двигатель на горячей воде», где SPARROW будет нагревать воду, подаваемую посадочным модулем, а затем выбрасывать её наружу для импульса тяги, чтобы прыгать по поверхности.
Вторая важная часть работы касалась управления этим движением. Коррекция траектории имеет важное значение для успеха миссии, но в этом случае конструкторы полагают, что независимо от того, где окажется робот, он сможет собрать образец и вернуться на посадочный модуль. Это связано с его конструкцией, которая позволяет роботу постоянно правильно ориентироваться, даже после того, как он некоторое время скользил по ледяной поверхности.
Однако инженерам концепции предстоит ещё много работы, прежде чем такая миссия будет готова к запуску. Некоторые из самых важных вопросов — как остановить образование льда в сопле двигателя робота и по всей его конструкции. Ледяные наросты могут легко исказить любые существующие расчёты траектории и теоретически полностью обездвижить робота, если они будут достаточно большими.
Однако в данный момент не существует решения этих проблем, поскольку проект ещё не получил финансирование Фазы II от NIAC, и работа над ним, похоже, застопорилась. Доктор Гарет Мейрион-Гриффит, главный исследователь проекта, перешёл из JPL в Collins Aerospace. Тем не менее, команда концепции SPARROW ожидает, что их разработка может быть интегрирована в миссию посадочного модуля на Европу.