Обзор Revopoint Miraco: первый 3D-сканер с полной автономностью
Инструмент, который способен воссоздавать точные копии нужных деталей, раньше могли позволить себе только крупные организации, т.к. цены очень сильно кусались. Сейчас же за 100 тысяч рублей можно купить сканер, который без помощи ПК в полевых условиях может собрать большой объем данных и построить качественную 3D модель с точностью до 50 микрон.

Содержание
Характеристики
| Наименование | Revopoint Miraco |
| Технология захвата | Проектор(структурированный свет) + 5 камер |
| Метод отслеживания | по геометрии, по маркерам, глобальный маркер |
| Точность построения | до 0.05 мм |
| Минимальное расстояние между точками | 0.05 мм |
| Рабочая дистанция | 100 — 1000 мм |
| Размер области захвата | 28 х53 мм на расстоянии 100мм / 975х775 мм на расстоянии 1000мм |
| Режимы съемки | одиночный снимок, непрерывная съемка |
| Скорость сканирования | до 15 кадров в секунду |
| Минимальная область сканирования | 10х10х10 мм |
| Максимальная область сканирования | 4х4х4 м |
| Дополнительная подсветка | ИК и белые светодиоды |
| Источник структурированного света | ИК излучатель класса 1 |
| Сенсор позиционирования | 9-осевой гироскоп |
| Разрешение цветной камеры для захвата текстуры | 48 МП |
| Экран | 6″ AMOLED ёмкостный6″ AMOLED ёмкостный |
| Процессор | 8 ядер 2.4ГГц |
| Объем внутренней памяти | 256 ГБ |
| Объем оперативной памяти | 16/32 ГБ |
| Операционная система | Android |
| Проводной интерфейс | Type-C |
| Беспроводная связь | Поддержка всех диапазонов, в том числе Wi-Fi6 |
| Питание | Аккумулятор ёмкостью 5000мАч обеспечивает автономность до 2 часов |
| Размер корпуса | 200х50х110 мм |
| Вес | 750 г |
| Защита | IP45 |
| Рекомендуемая конфигурация ПК | macOS: M3 or better, RAM ≥ 8GB; Windows: Intel i9 11th or better; RAM ≥ 32GB |
| Выходные форматы файлов | PLY, OBJ, STL, ASC, 3MF, GLTF, FBX |
Распаковка
Приходит в двойной коробке, внешняя защищает основную от пвреждений.

В одном из отсеков уложена фирменная сумка с регулируемым ремнем для плеча.


Во второй секции под мягкой вставкой в подиуме лежит сканер, тестовая модель из гипса, блок питания с длинным кабелем для зарядки и передачи данных, калибровочная панель, а так же несколько видов тканевых холстов с маркерами.

Для экономии места, остальные комплектующие были помещены в сумку. Среди них складной штатив, ремешок для фиксации корпуса в руке, Type-C переходник, поворотную платформу, кабель питания и «замшевый» платочек.


Питание стола всего 5В, так что подойдет любой БП или павербанк. С помощью элементов управления можно выбирать направление и регулировать скорость вращения. Несмотря на диаметр 125мм, платформа выдерживает вес в пару килограмм без каких-то перекосов или рывков.


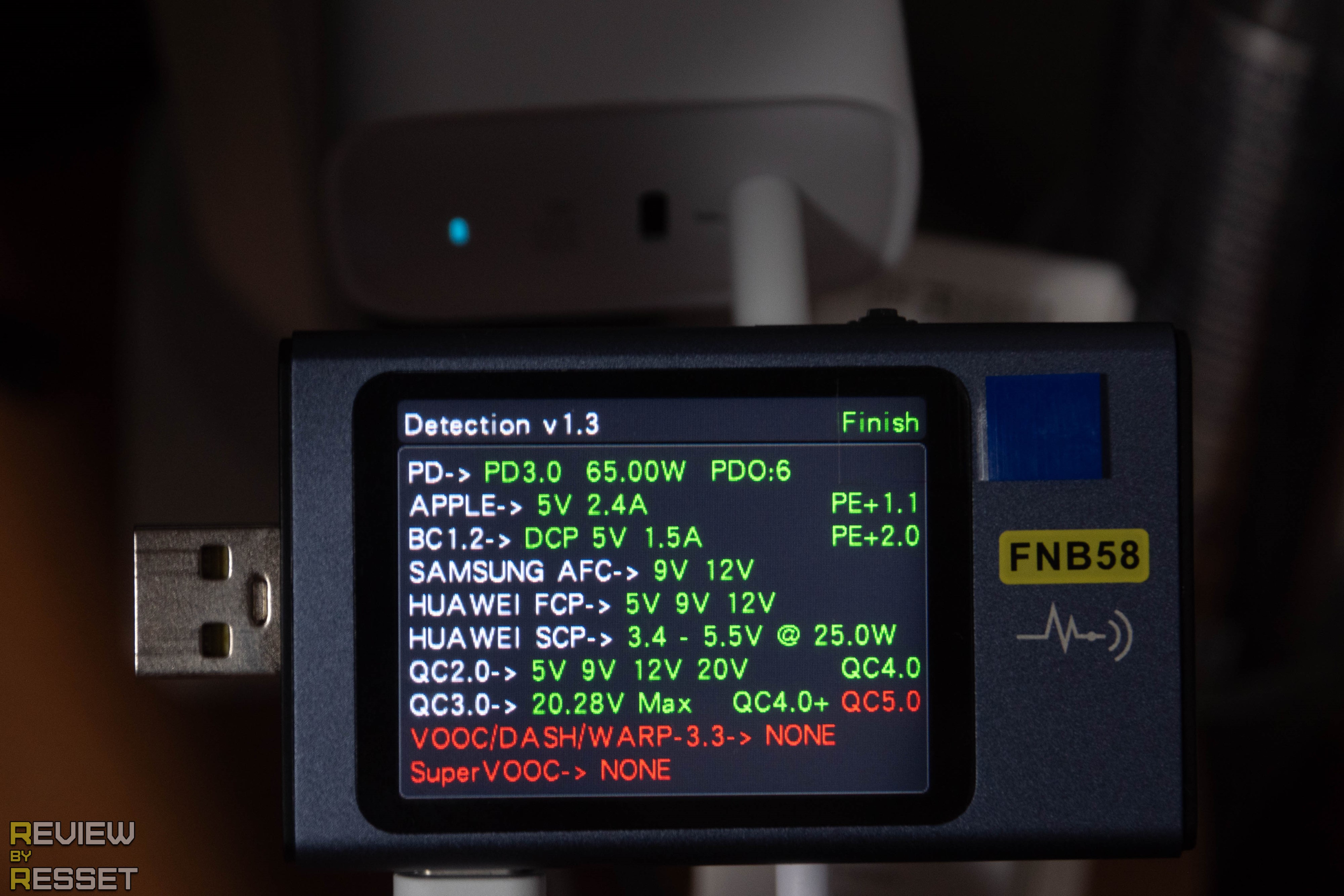
Блок питания поддерживает большинство протоколов быстрой зарядки до 65Вт.


На верхней панели корпуса находятся черно-белые модули захвата глубины: два боковых служат для построения моделей на расстоянии до метра, вторая пара ближе к центру наклонена под другим углом и фокусное расстояние у них от 100мм. Пятая цветная камера служит для захвата текстуры. У каждого сенсора имеется по два ИК светодиода для дополнительной подсветки объектов, у цветного они белые. Со стороны сканер выглядит как фотоаппарат, пусть и очень странный. Сходству так же способствуют прорезиненные выступы для обеспечения лучшего хвата и кнопка спуска на верхней грани. Справа расположена небольшая кнопка, которая переводит устройство в режим удержания или полностью выключает его при удержании.


В нижней части есть резьба под 1/4″ винт, что позволяет устанавливать корпус на любой штатив. На левой грани вывели разъем Type-C, так и хочется его прикрыть какой-нибудь заглушкой.


Кроме кнопок спуска и выключения, физических элементов управления нет и все остальные манипуляции осуществляются с помощью откидного сенсорного AMOLED экрана размером 6″.


Корпус спроектирован неплохо, во время работы держать его комфортно, пальцами можно дотянуться до всех нужных зон. При использовании темляка, вполне удобно пользоваться и одной рукой, несмотря на вес 750 грамм.



Сумка пошита неплохо, сканер входит плотно, но т.к. в нижней части корпус становится тоньше, в передний отсек спокойно помещается блок питания и кабель для зарядки при необходимости. Ну и конечно маркеров с тряпочками можно накидать горсть.

Первое включение и настройки сканера
Благодаря AMOLED экрану с разрешением 2К, картинка получается очень яркой, но при этом контрастной. Для начала нужно будет выбрать привычный язык интерфейса и подключиться к домашней сети. У меня сразу вылезло уведомление о наличии обновления ПО. Под конец вылазит интерактивная инструкция, которая объясняет для чего нужны все кнопки на главном экране.




В качестве операционной системы используется кастомизированный Android, но есть и знакомые элементы.

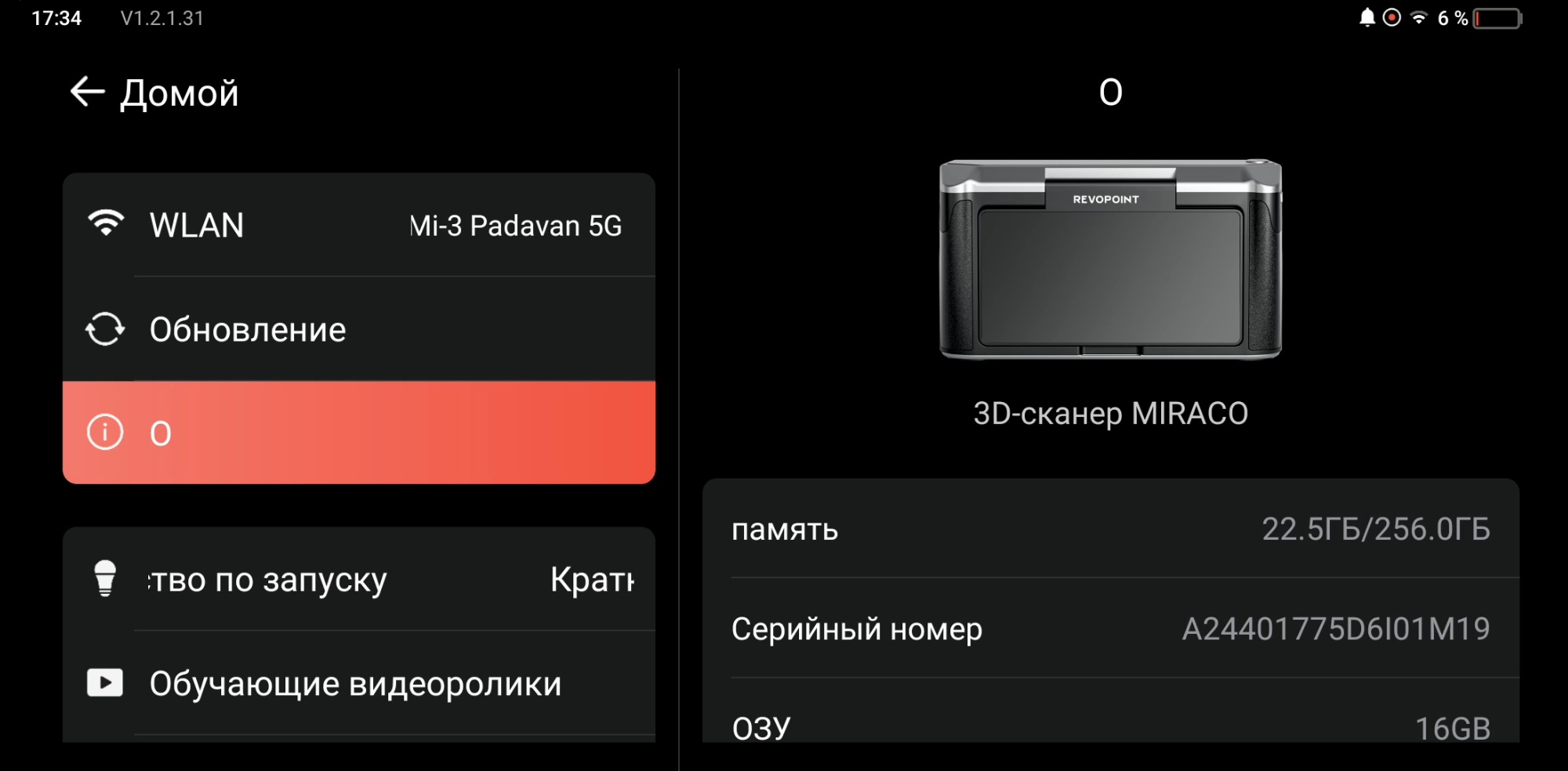
В системных настройках вроде всё понятно, тут выбирается беспроводная сеть, проверяются обновления, в информации о системе можно вспомнить свою конфигурацию(есть несколько ревизий).


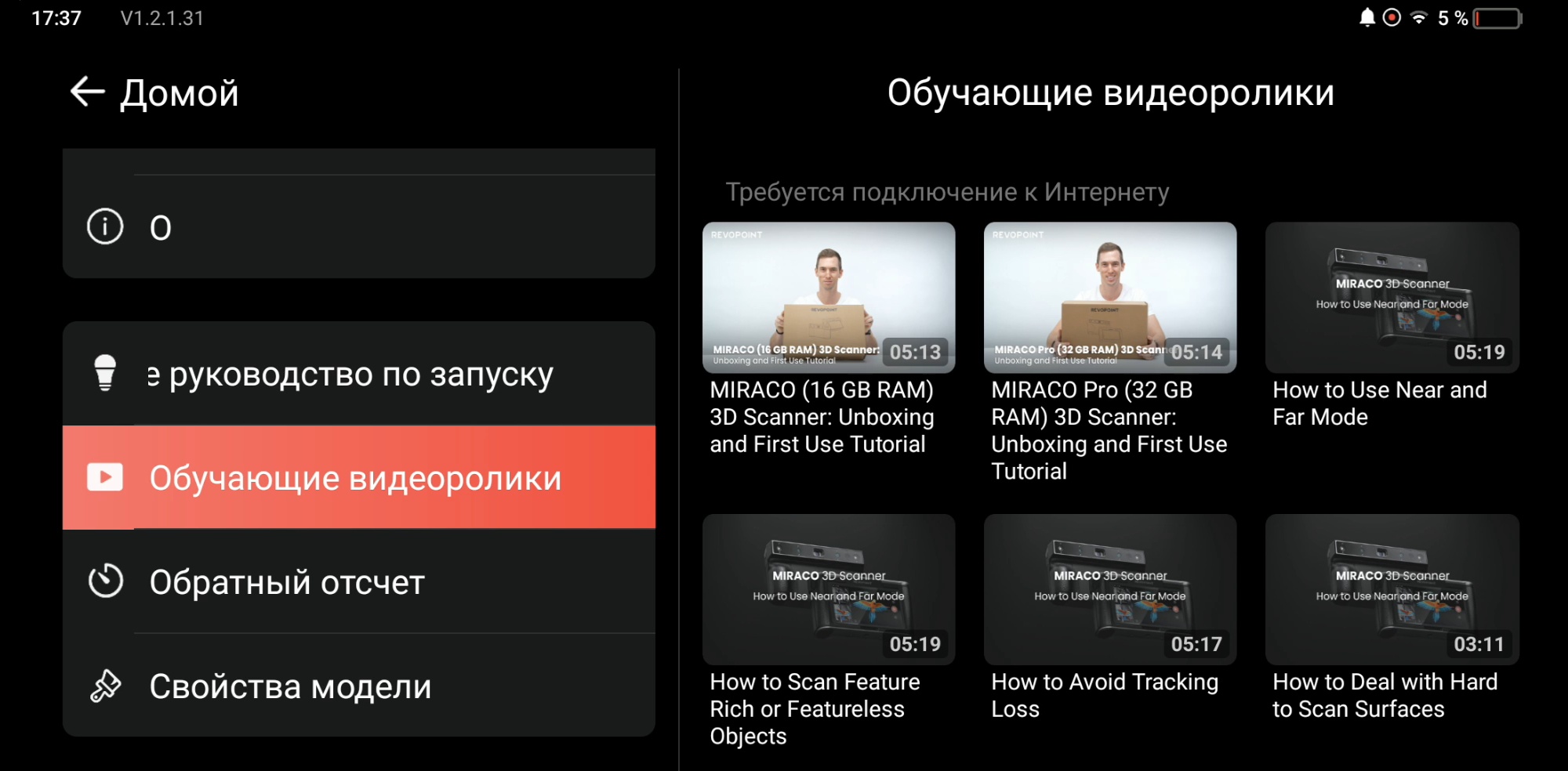
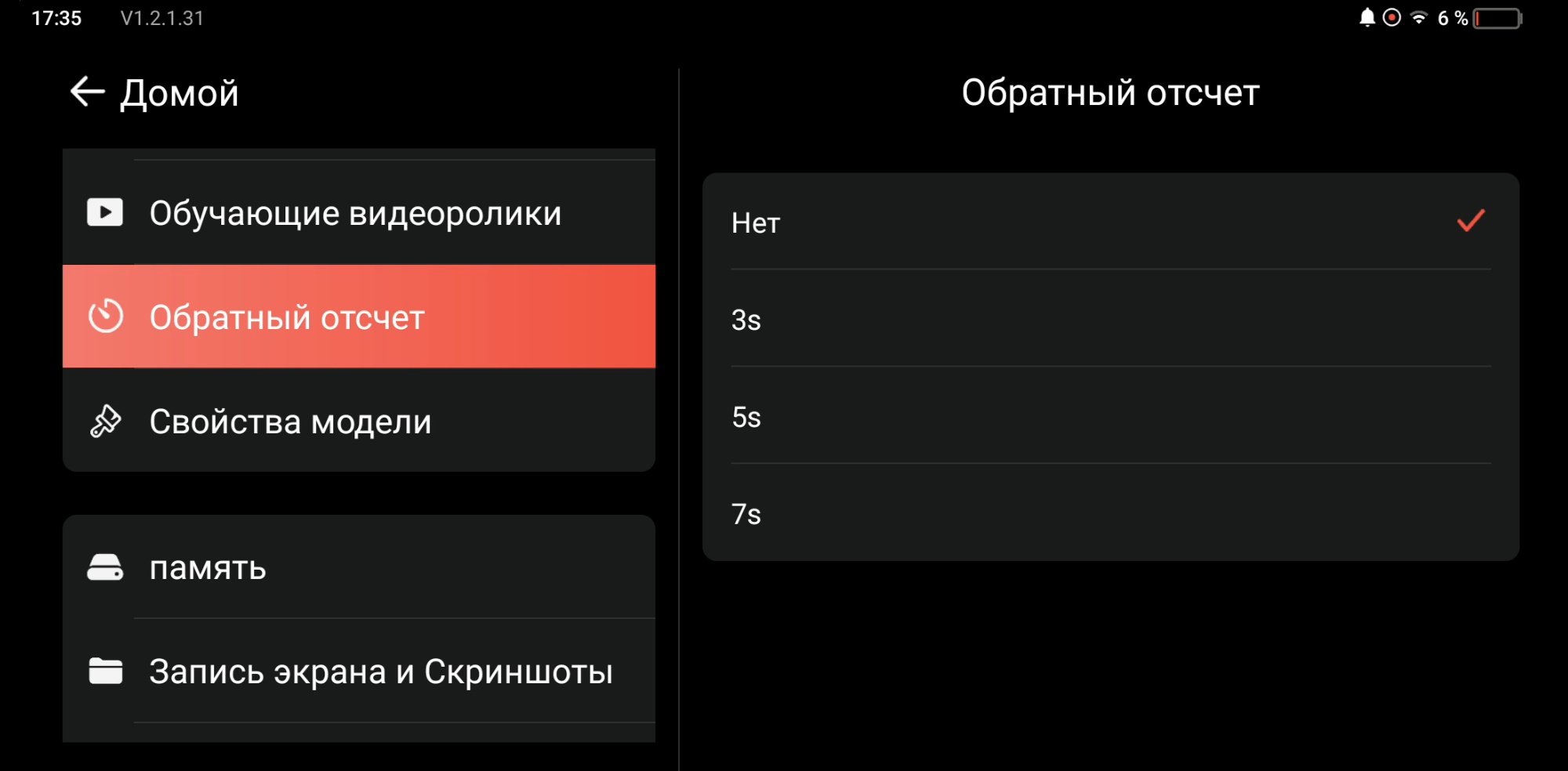
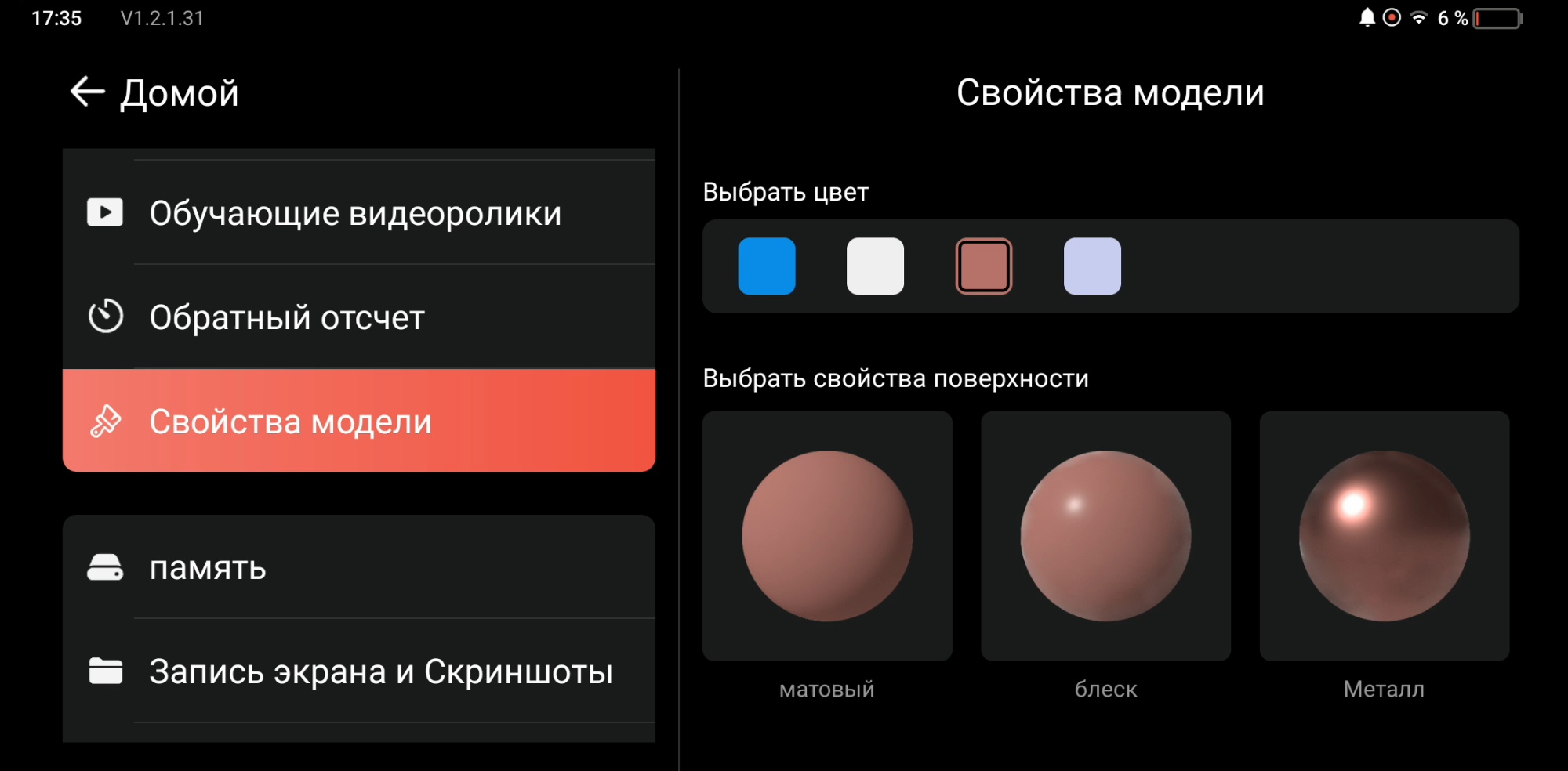
Имеются и обучающие материалы, вот только они находятся в youtube и смотреть их будет затруднительно. При желании можно установить задержку перед съемкой до 7 секунд, чтобы успеть обеспечить неподвижное положение корпуса. Есть и смена внешнего вида формируемой поверхности. Не нравится синий цвет? Есть белый, медный и серый от матового до глянцевого.
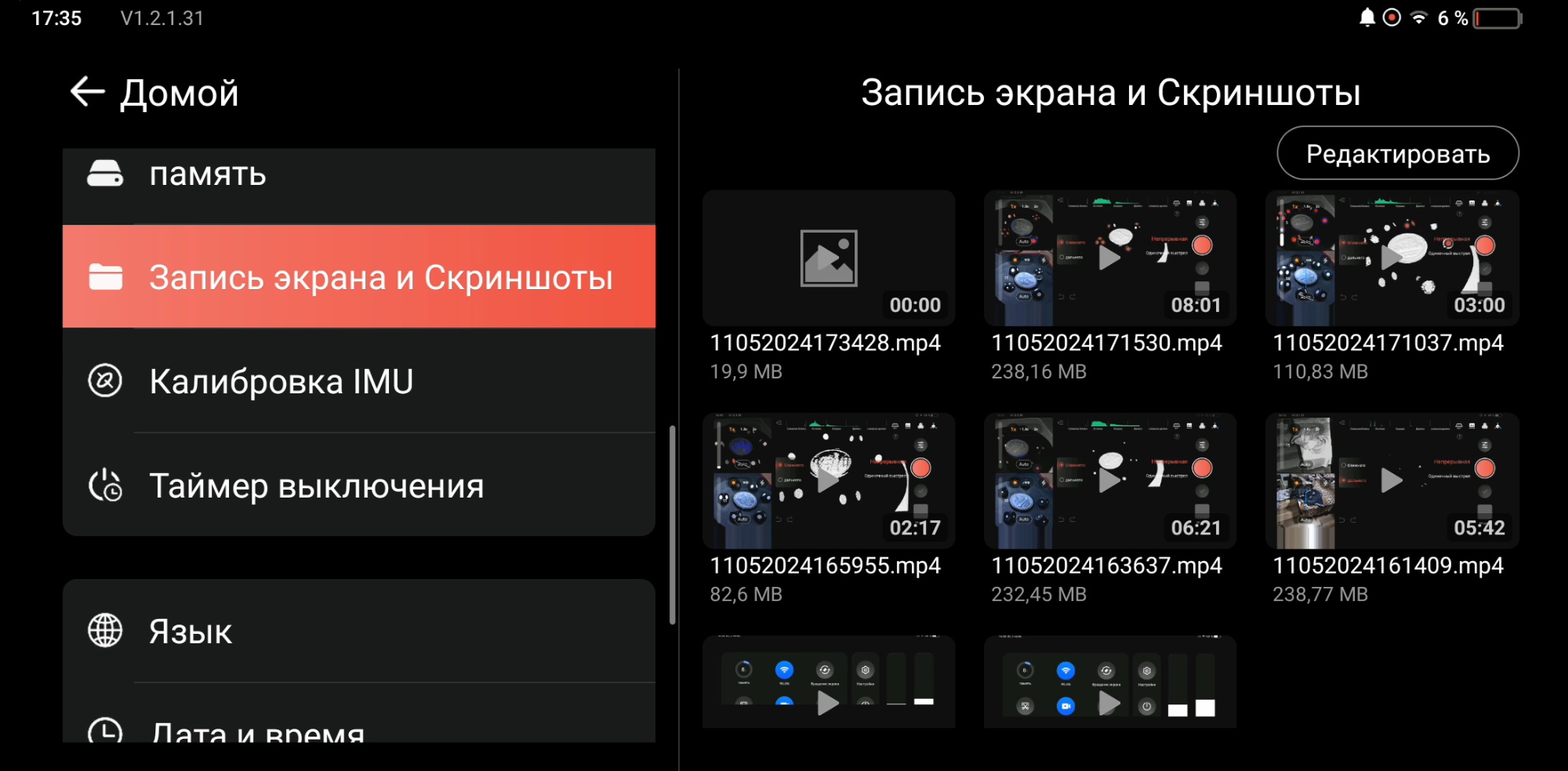
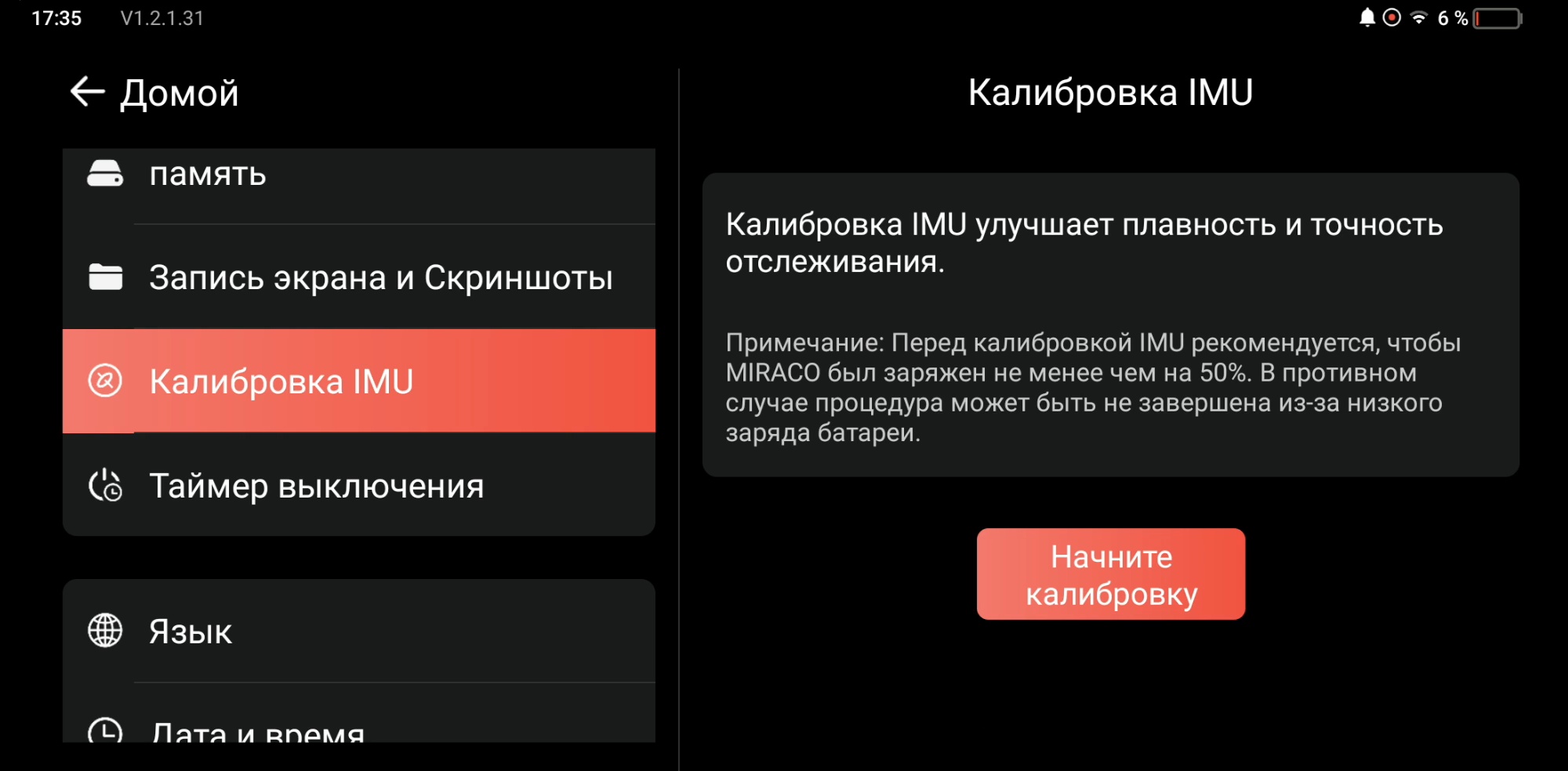
В следующих вкладках можно проверить остаток памяти и очистить её, чтобы освободить место для новых крупных проектов. У меня самые большие занимали около 3 Гб, но думаю это далеко не предел. Из шторки можно сделать скриншот или активировать запись видео, которые потом хранятся в одноименной вкладке. Калибровка IMU занимает совсем немного времени и рекомендуется делать её если возникают какие-то проблемы с позиционированием. При активации корпус нужно будет как можно ровнее повернуть на 360 градусов по вертикали, а затем по горизонтали.

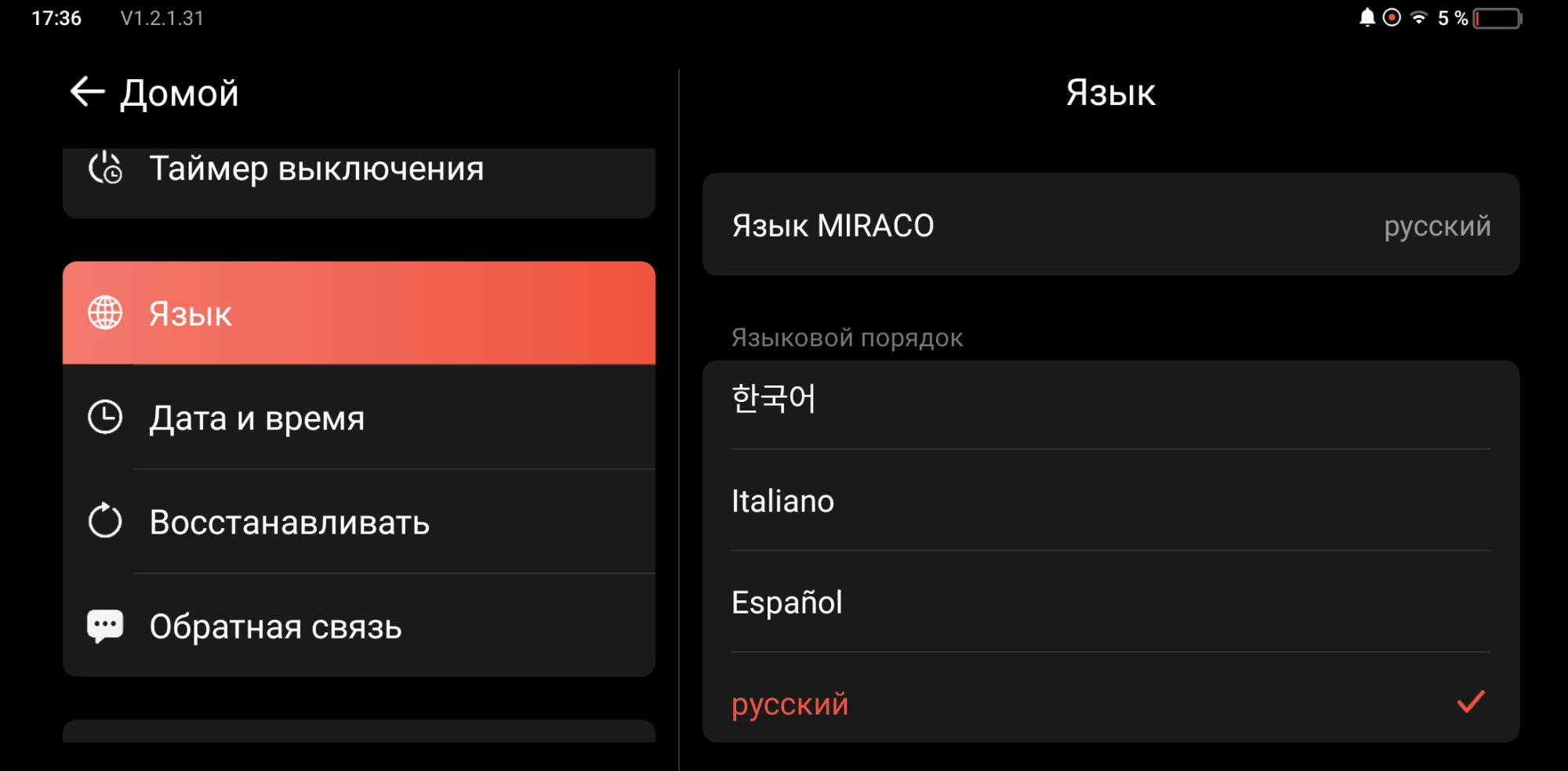
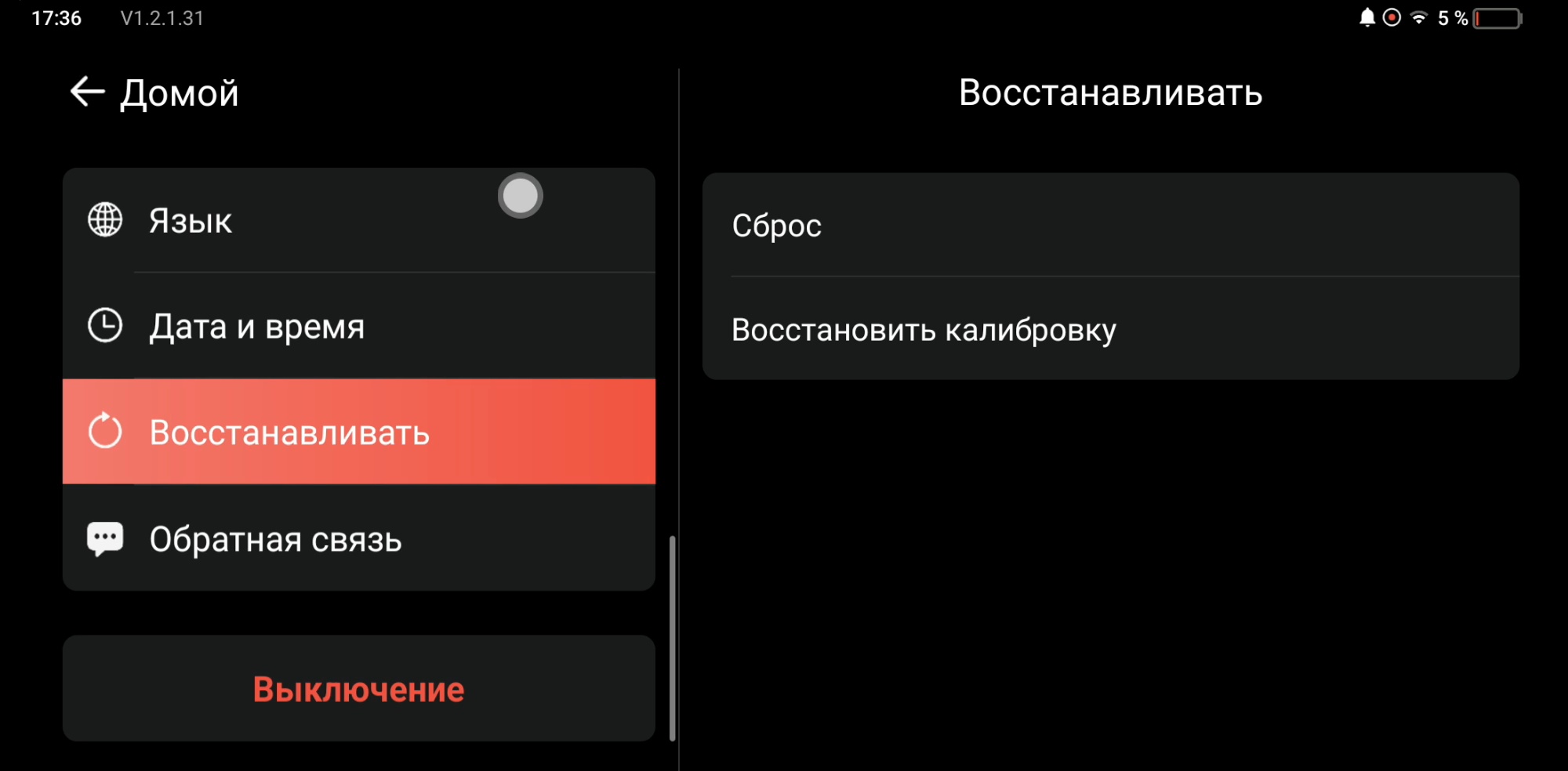
Таймер выключения может прилично увеличить автономность устройства за счет активации режима сна при бездействии. Чуть ниже можно сменить язык интерфейса, вернуть предыдущие параметры калибровки если что-то пошло не так во время последней, а так же сбросить настройки на значения по умолчанию.

Настройки сканирования
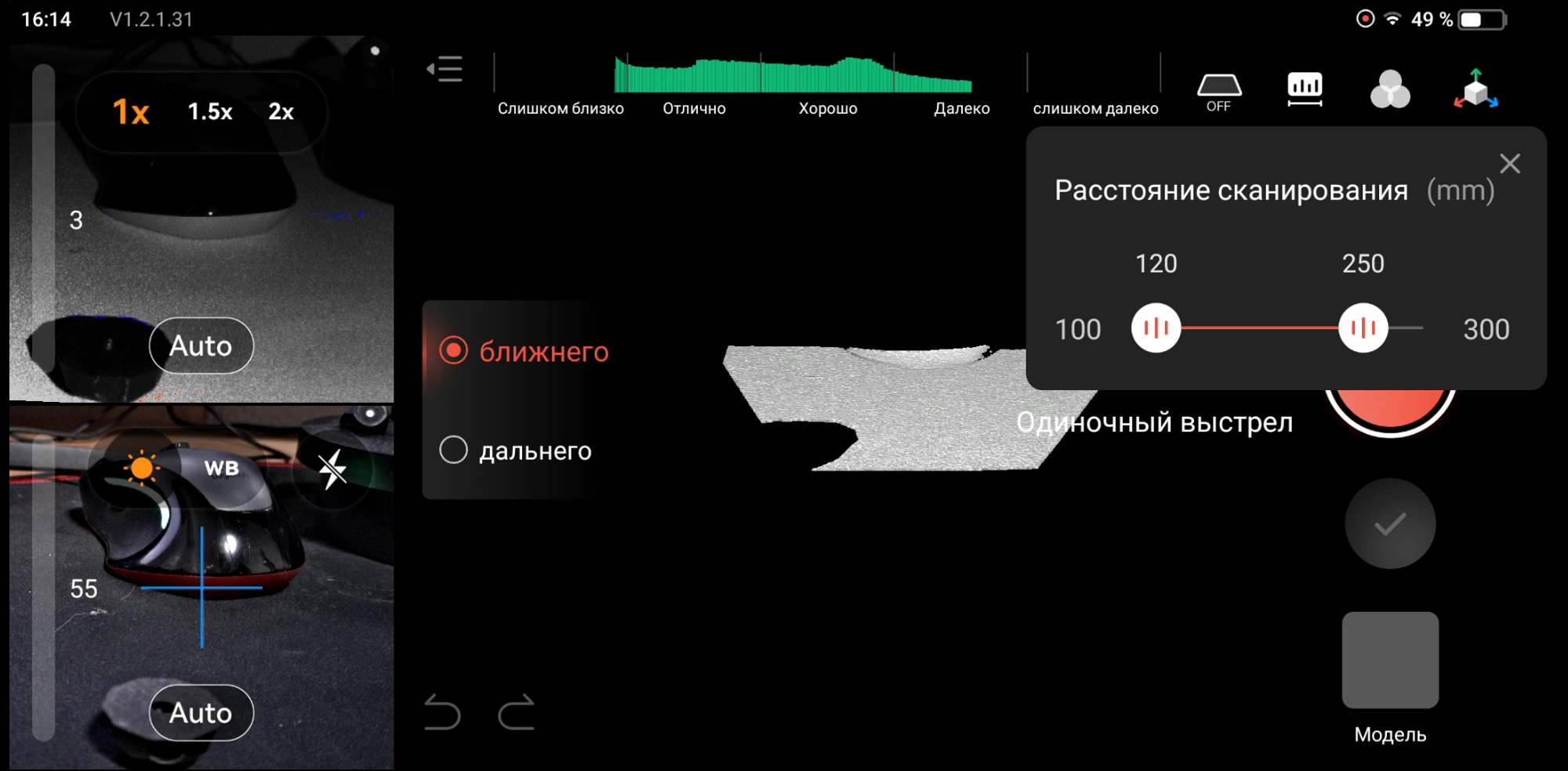
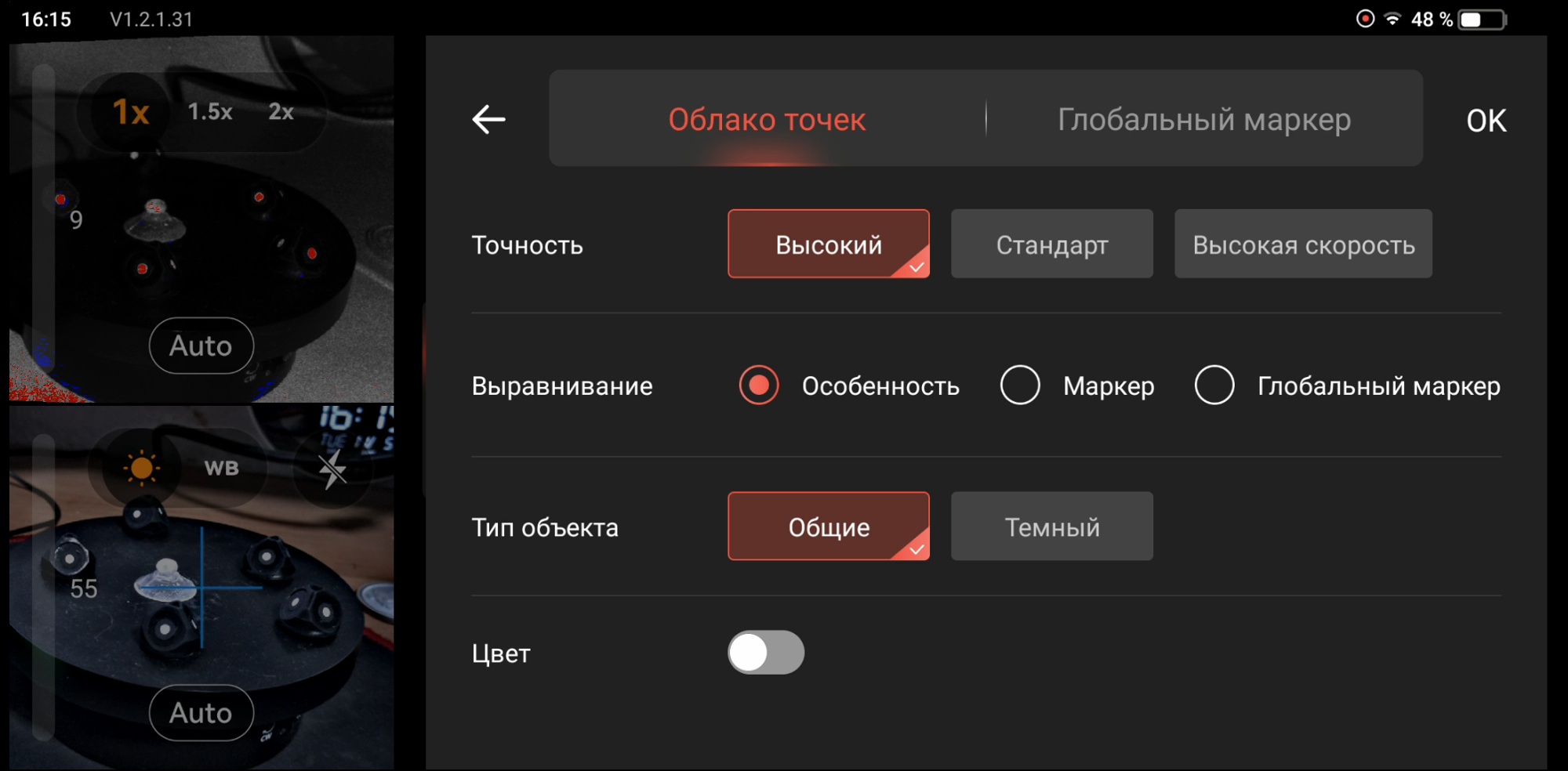
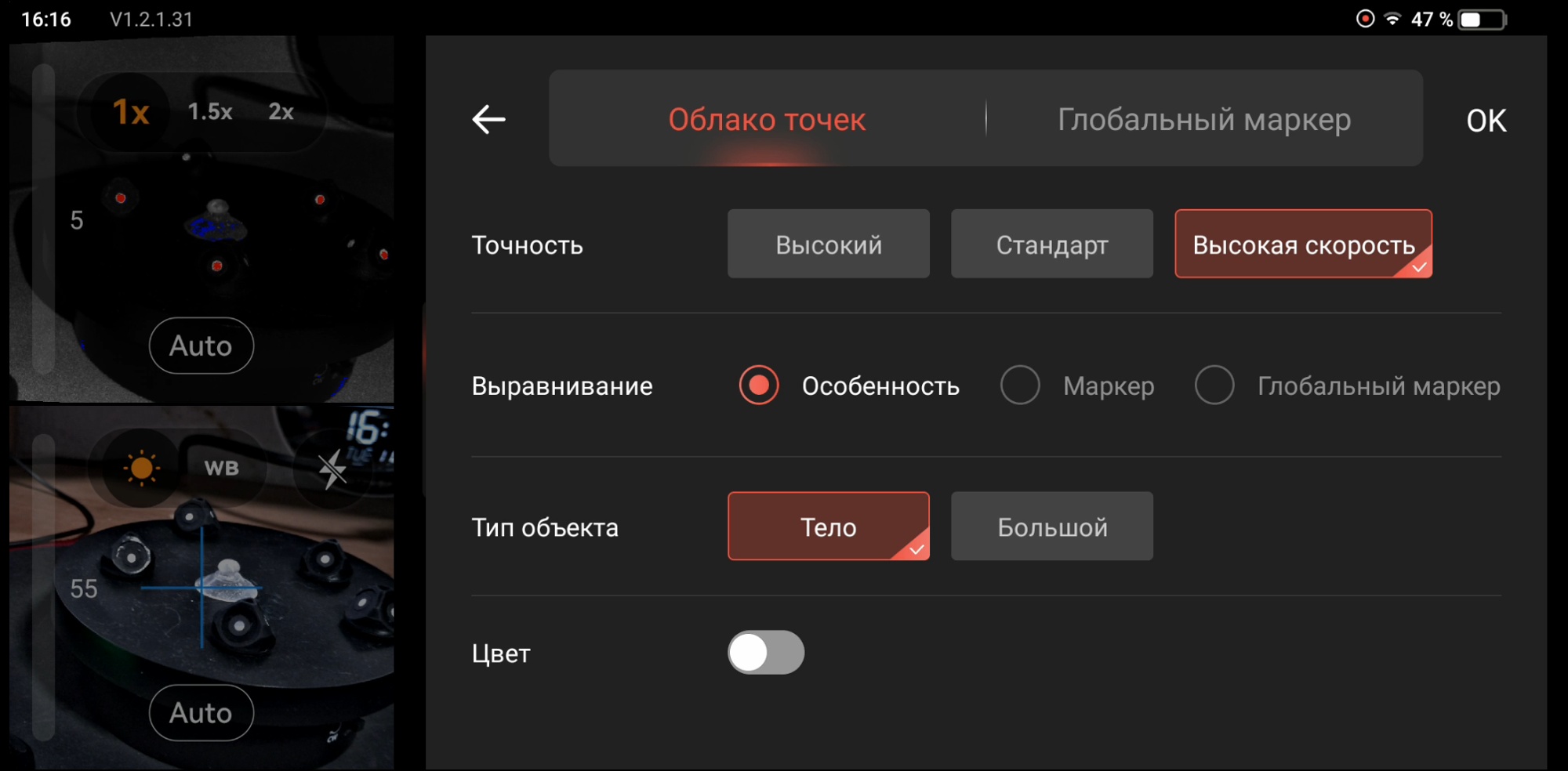
Для начала нужно определиться с расстоянием сканирования. На ближней дистанции детализация получается выше, но поле зрения сканера ниже, в то время как в режиме дальнего объекта, будет захватываться область гораздо большего размера и процесс заметно ускорится.

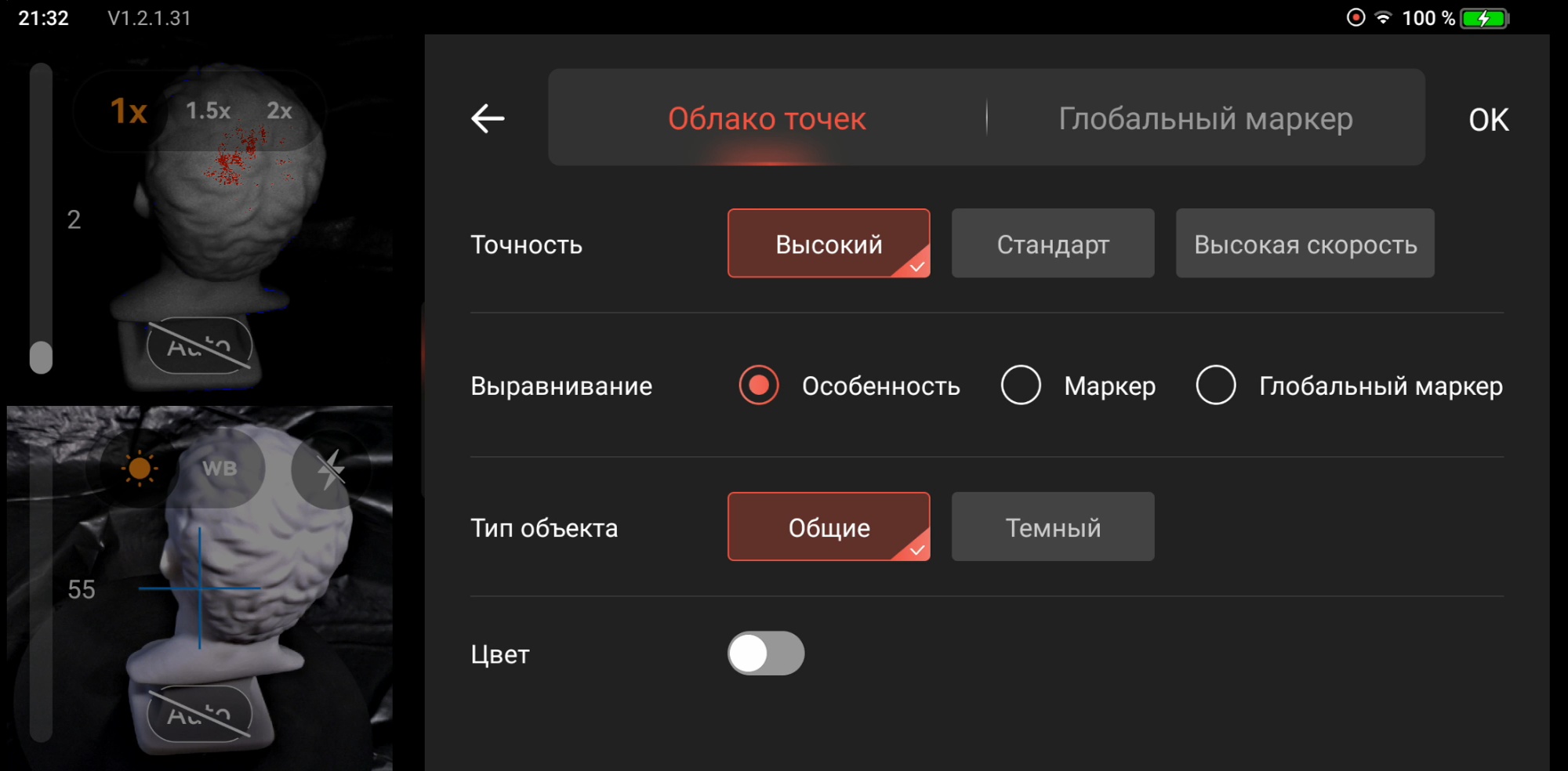
Затем нужно выбрать оптимальные параметры захвата. В зависимости от степени детализации объекта, нужно выбрать между высокой/стандартной точностью или высокой скоростью. Выравнивание осуществляется по геометрии, либо по маркерам, при чем выбор зависит от формы детали. В первом случае алгоритм будет отслеживать уже созданную форму, сопоставлять её с тем, что видят сенсоры и обеспечивать бесшовное построение. Во втором, система будет опираться только на точки маркеров и при перевороте объекта нужно будет формировать его как отдельный участок, а затем сшивать. Тип объекта влияет на автоматическую настройку экспозиции.

Так же можно активировать формирование текстуры и даже есть выбор разрешения картинки, но эта опция работает только при построении модели одиночными спусками, в автоматическом режиме качество урезается.
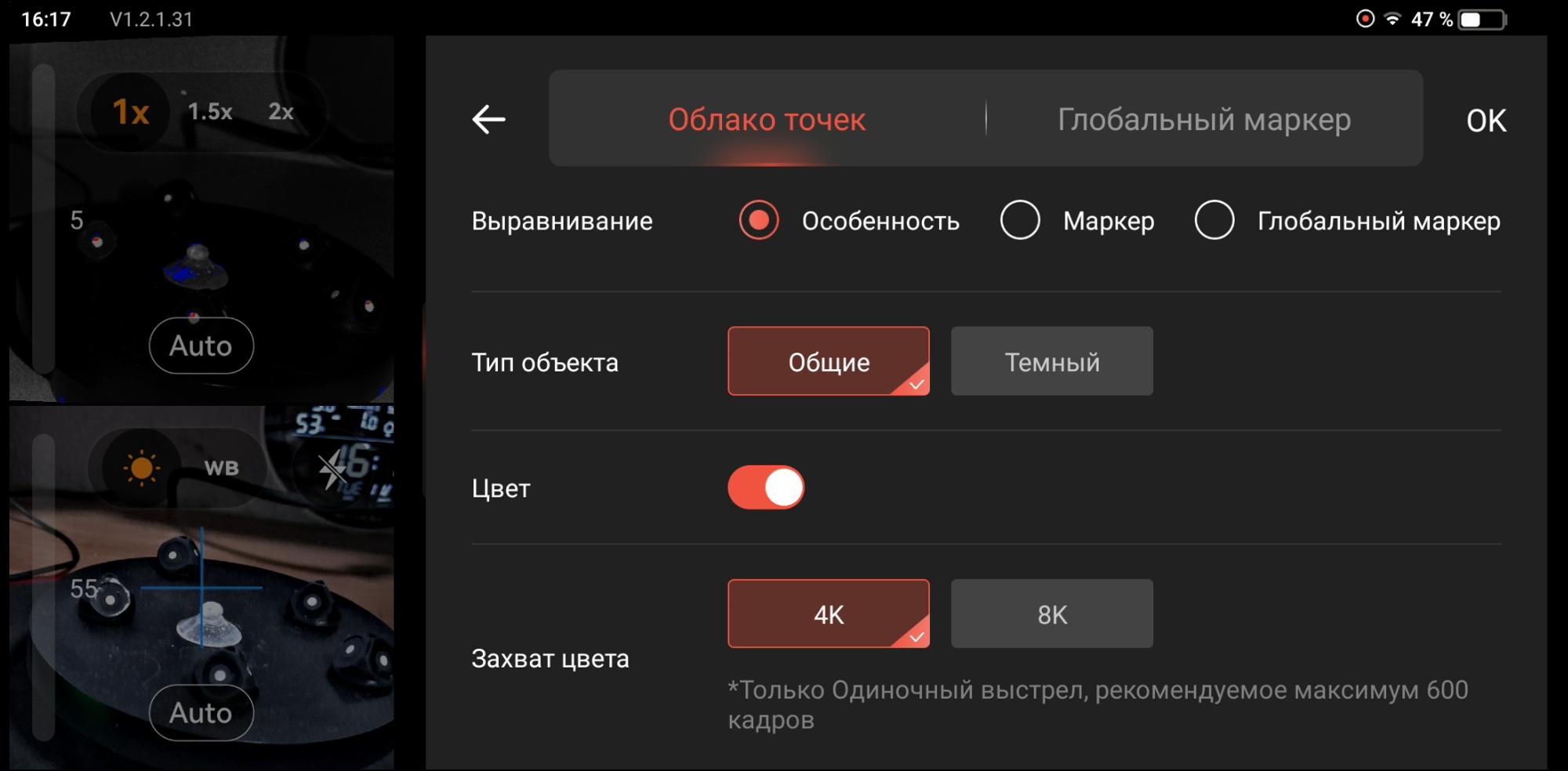
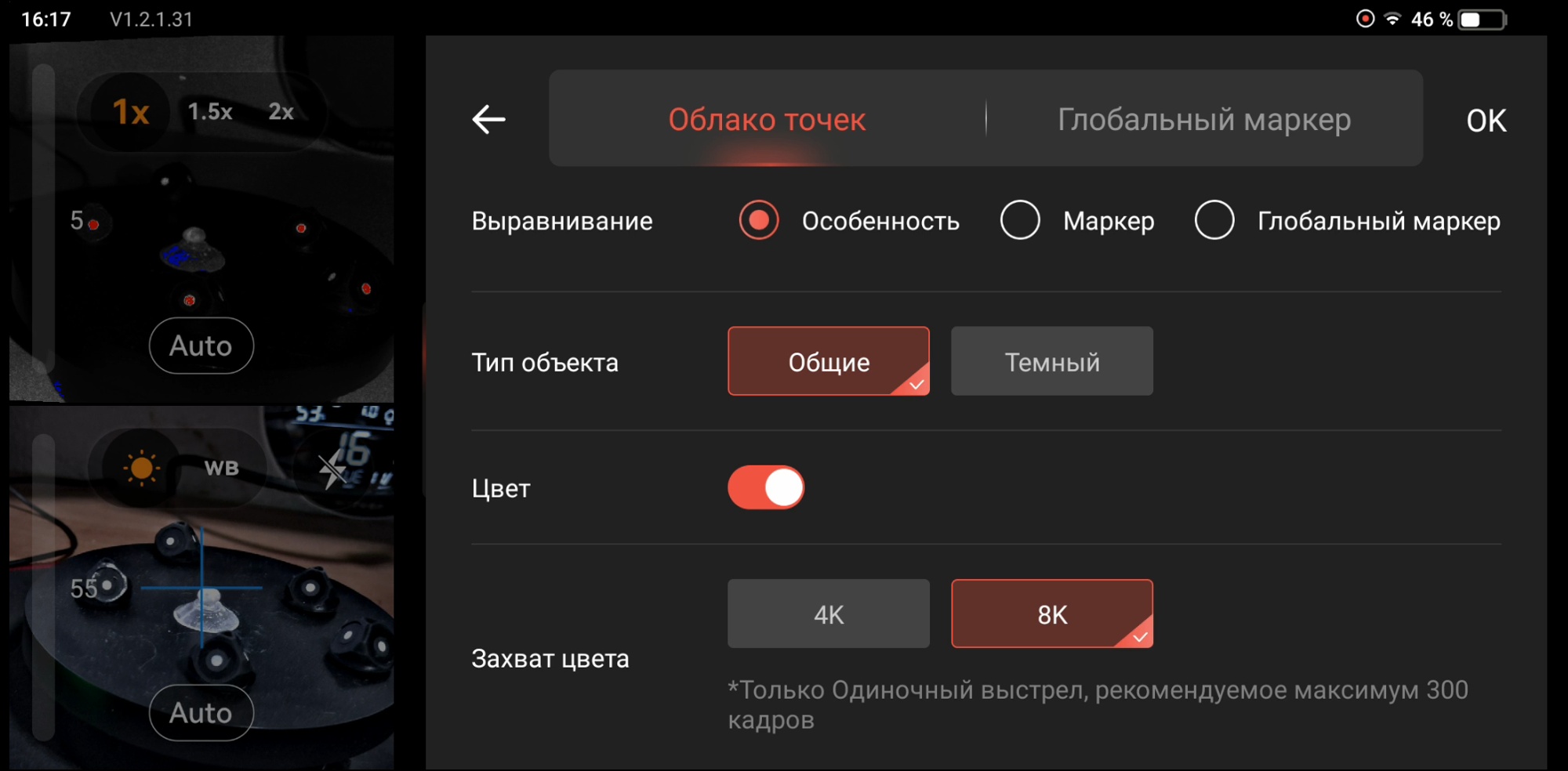
Я приведу три примера. Результат слева получен при непрерывной съемке, по центру в режиме одиночных снимков с разрешением 8К, ну и справа одиночные снимки в 4К. Не сказать, что разница колоссальна, но она есть.

Первое сканирование
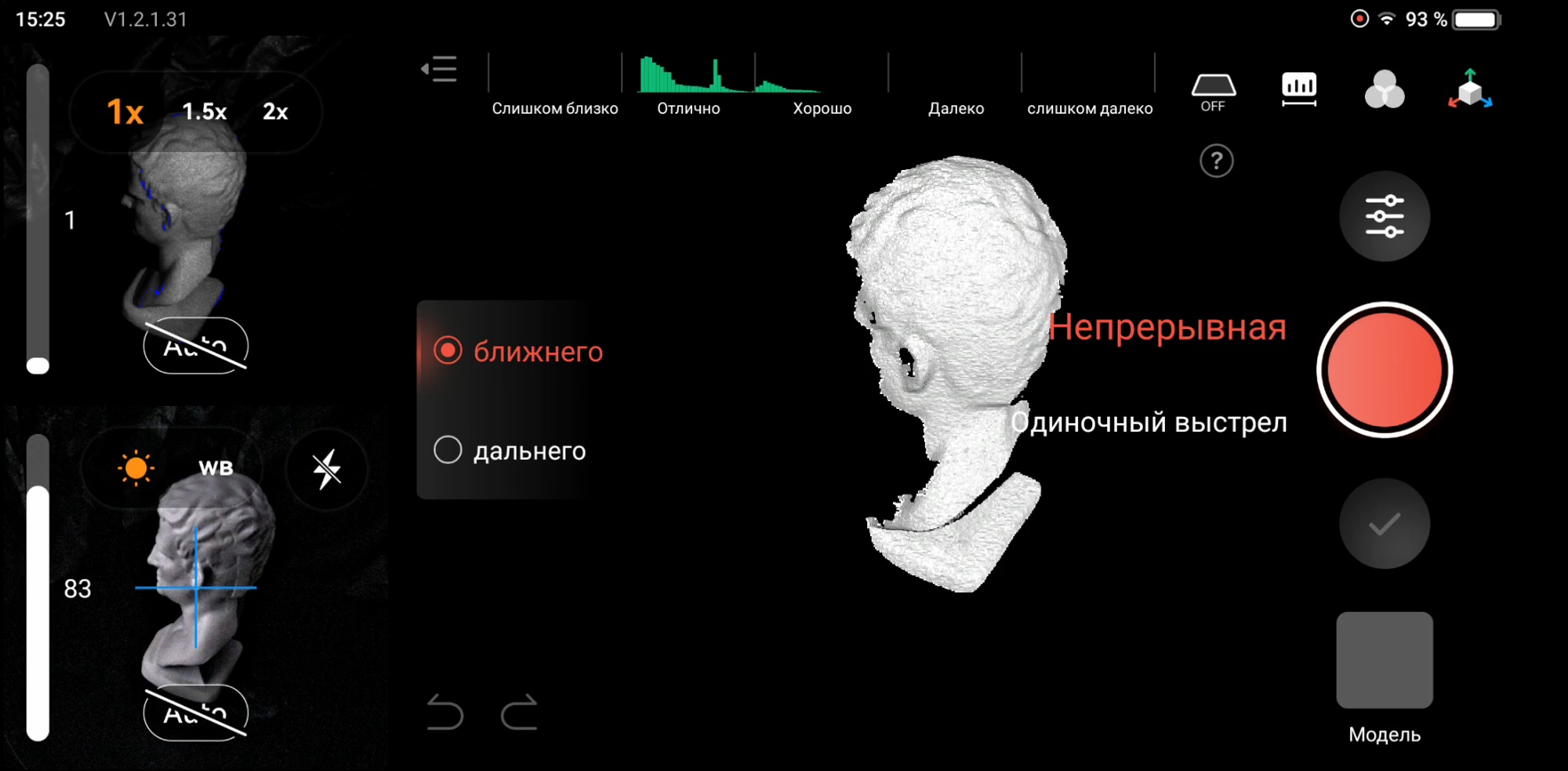
Скорее всего многие после распаковки возьмут бюст, который был в комплекте. У него довольно плавные формы, нет массивов повторяющихся вершин, а значит можно быстренько отсканировать его с выравниванием по геометрии.
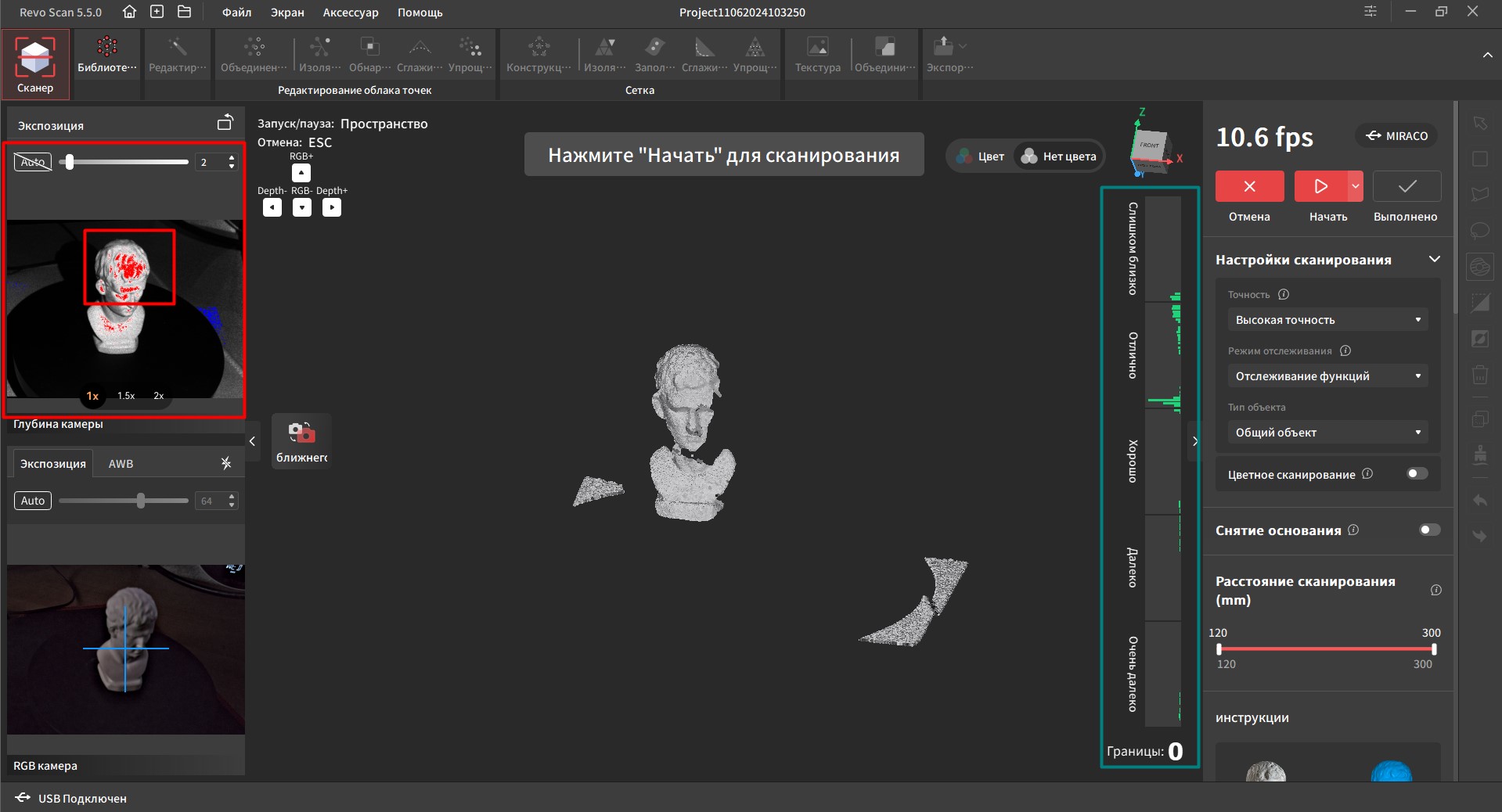
Затем нам нужно разместить сканер на расстоянии, при котором шкала объема в верхней части будет в границах отметок «Отлично» и «Хорошо». Чем лучше фокусировка, тем больше деталей будет на снимках. Не менее важна и экспозиция(левый верхний угол). Двигая ползунок, нужно добиться оптимальной чувствительности сенсоров, красные зоны указывают на участки с излишней яркостью, а синие с недостаточной. Редко получается полностью от них избавиться, так что главное минимизировать количество.
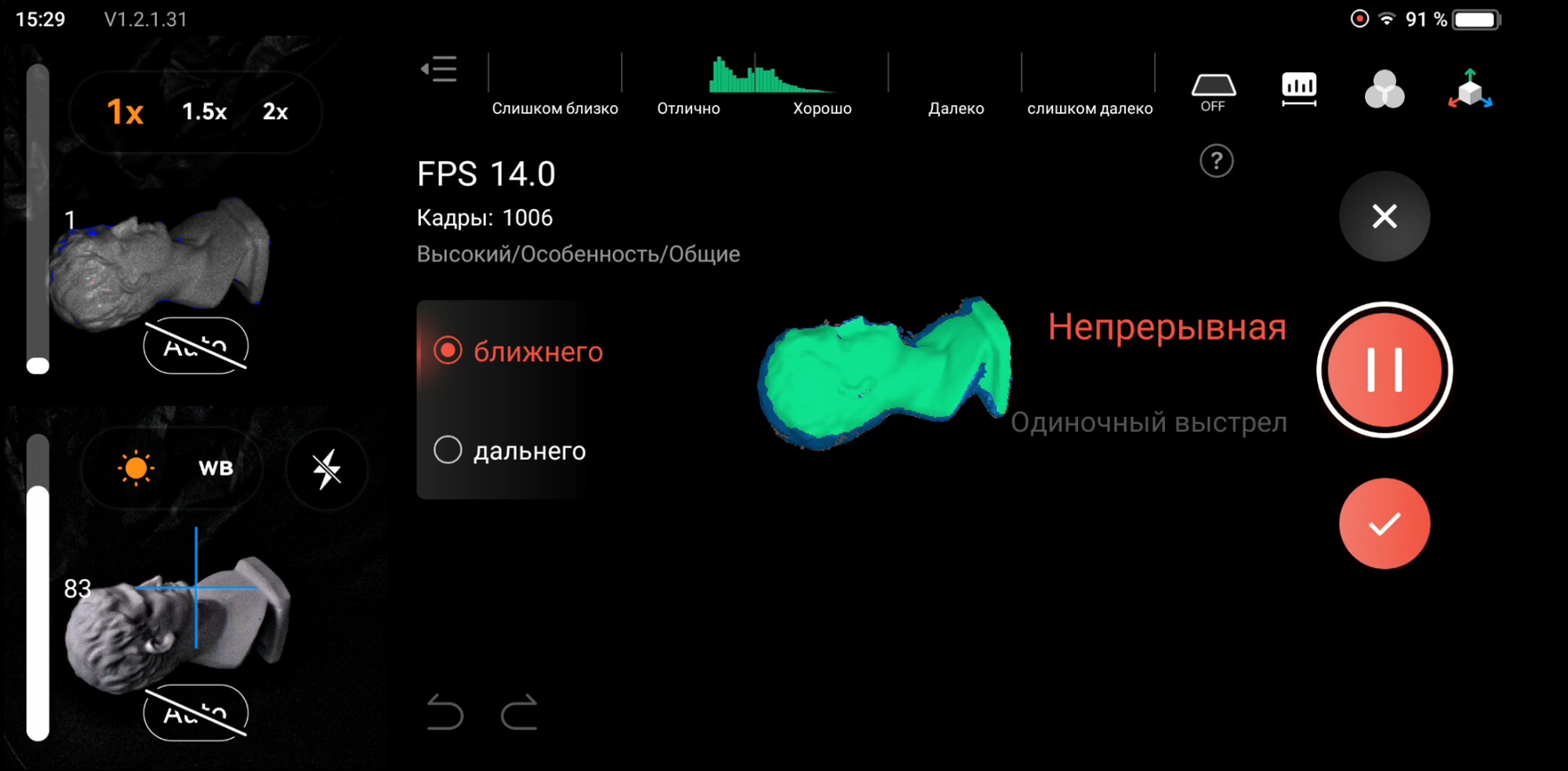
Далее включаем поворотный стол и нажимаем кнопку пуска. Нам будет достаточно одного оборота, при повторных вреда будет больше, чем пользы, т.к. снимки начнут накладываться друг на друга.

При таком ракурсе камеры не захватят некоторые области, в которых останутся дыры. Но т.к. мы сканируем в режиме захвата геометрии, можно просто поставить процесс на паузу, изменить положение бюста и продолжить. Алгоритм довольно быстро определяет смену позиции и подстраивается под неё.
Ну и для последнего ракурса повернул деталь еще раз.
Нажимаем галочку и видим предварительное облако точек, сформированное из 1223 снимка.
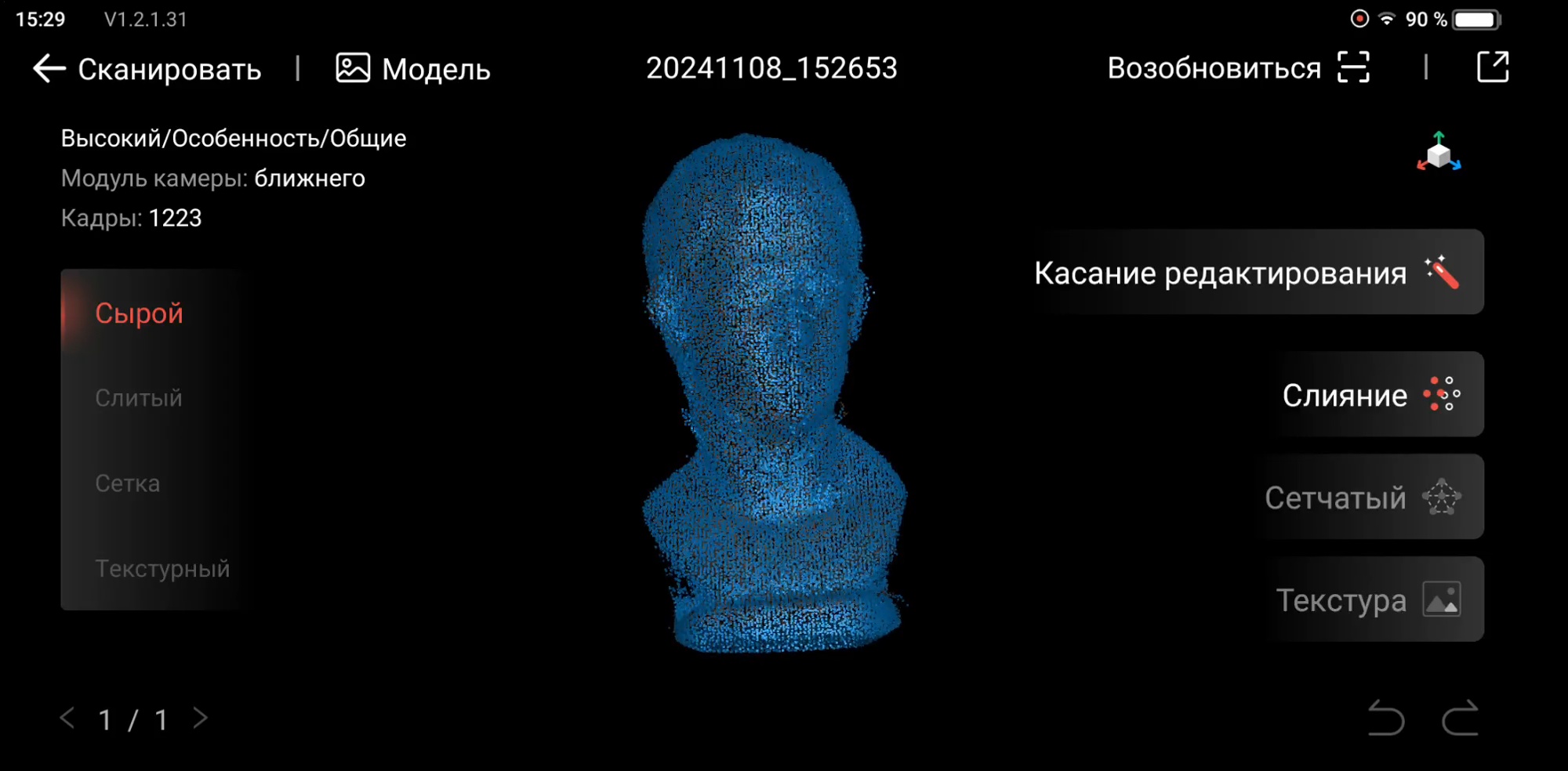
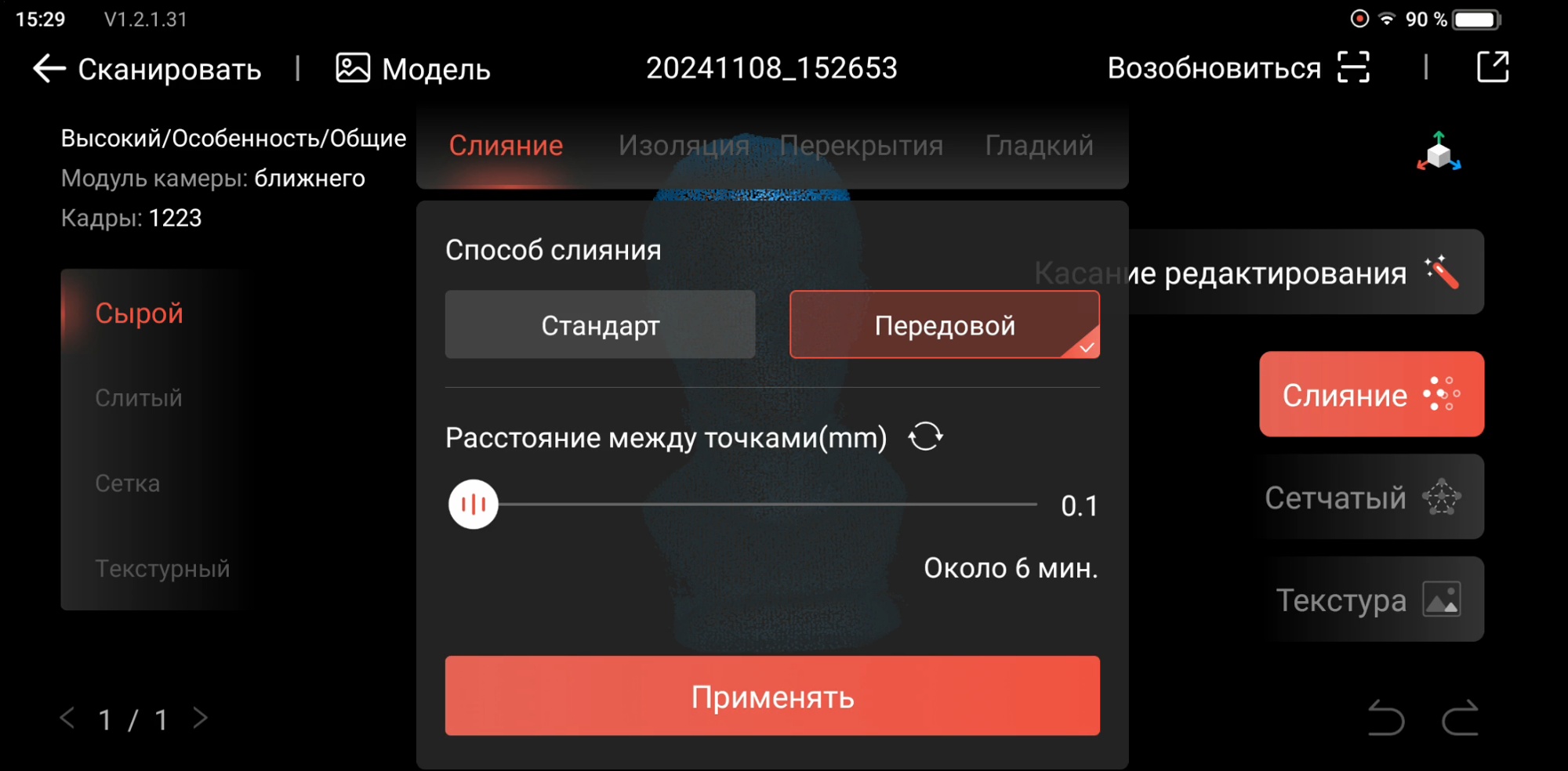
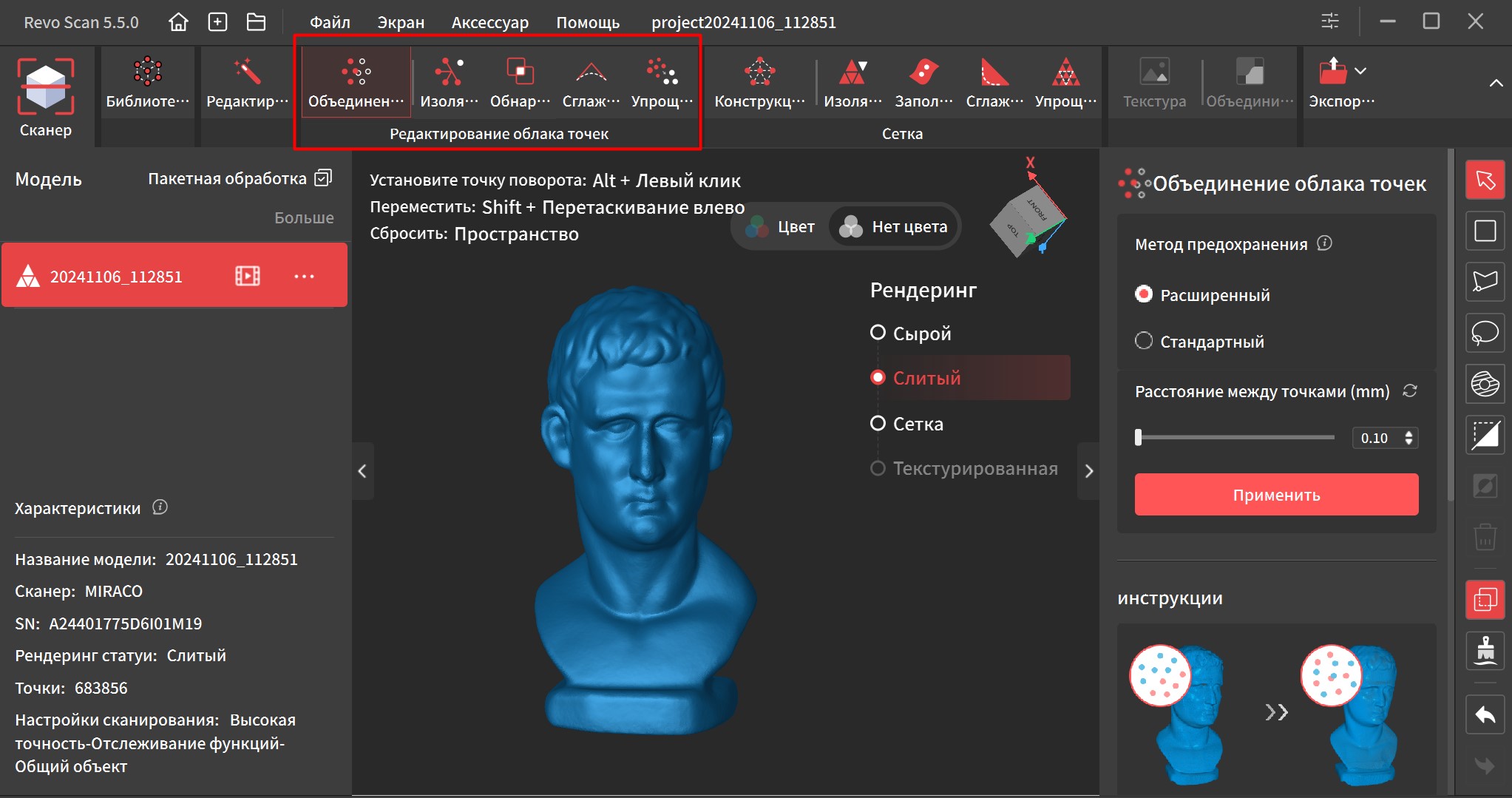
Чтобы получить нормальный результат, нужно провести слияние точек. В процессе лишний шум будет удален и останется один плотный слой, а вместо количества кадров начнет отображаться число точек, из которых сейчас сформирована модель. Система сама предлагает оптимальное расстояние между точками в зависимости от детализации исходного объекта, формируя оптимальный результат с минимальными затратами ресурсов и времени.

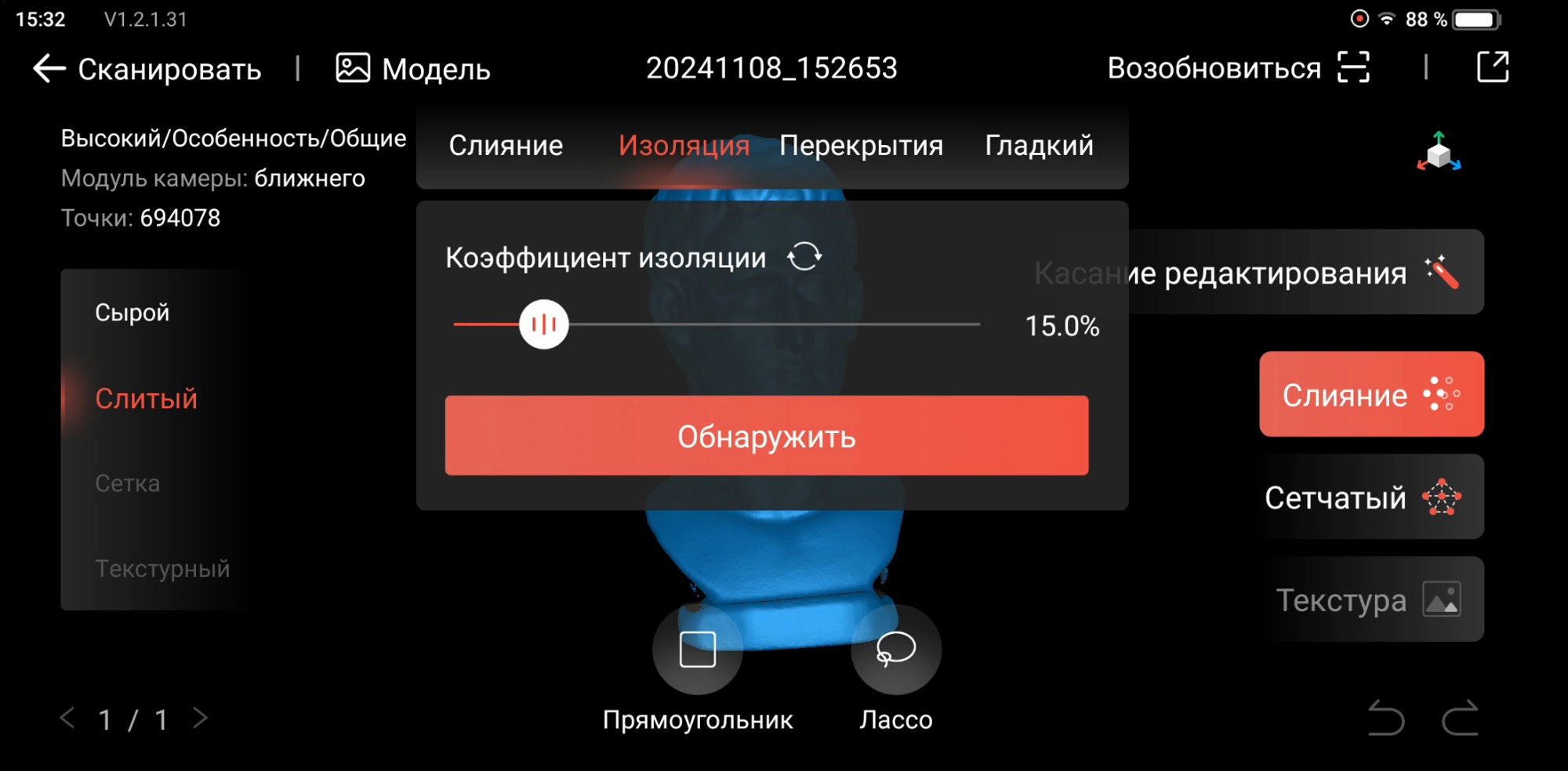
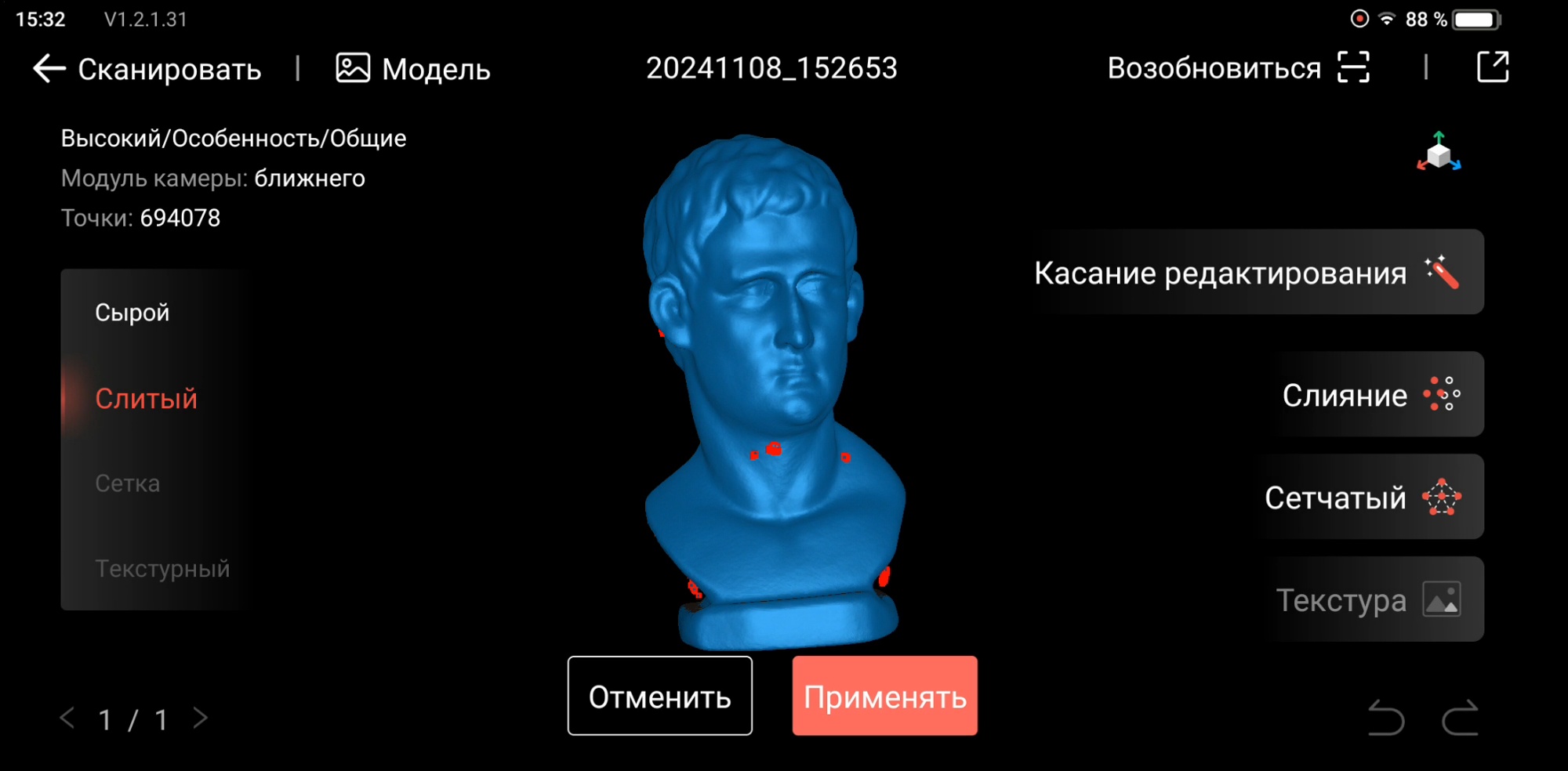
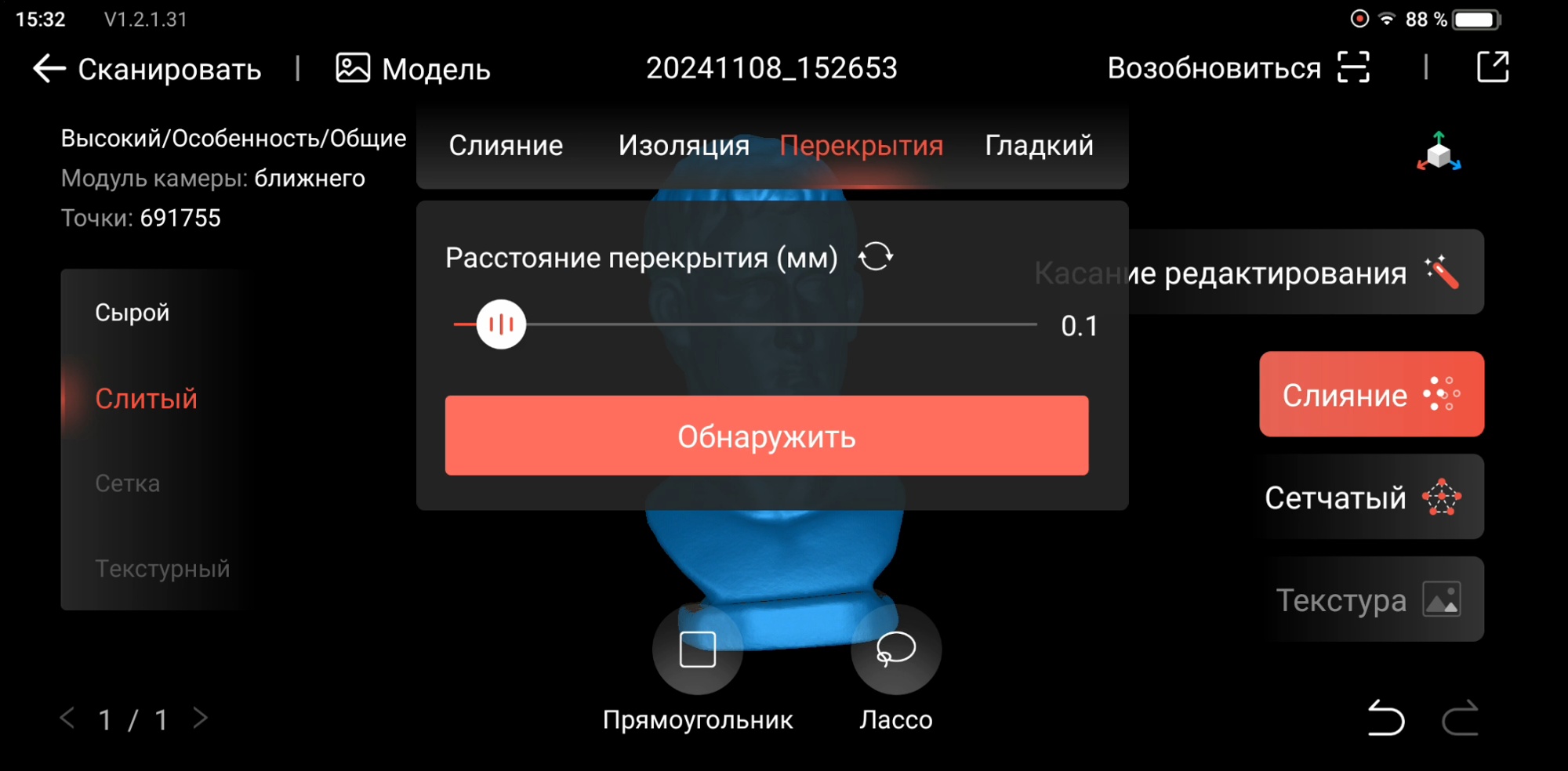
После объединения облака точек, могут формироваться уплотнения за пределами основной модели. Это нормально и во второй вкладке есть инструмент, который позволяет автоматически избавляться от таких объектов.
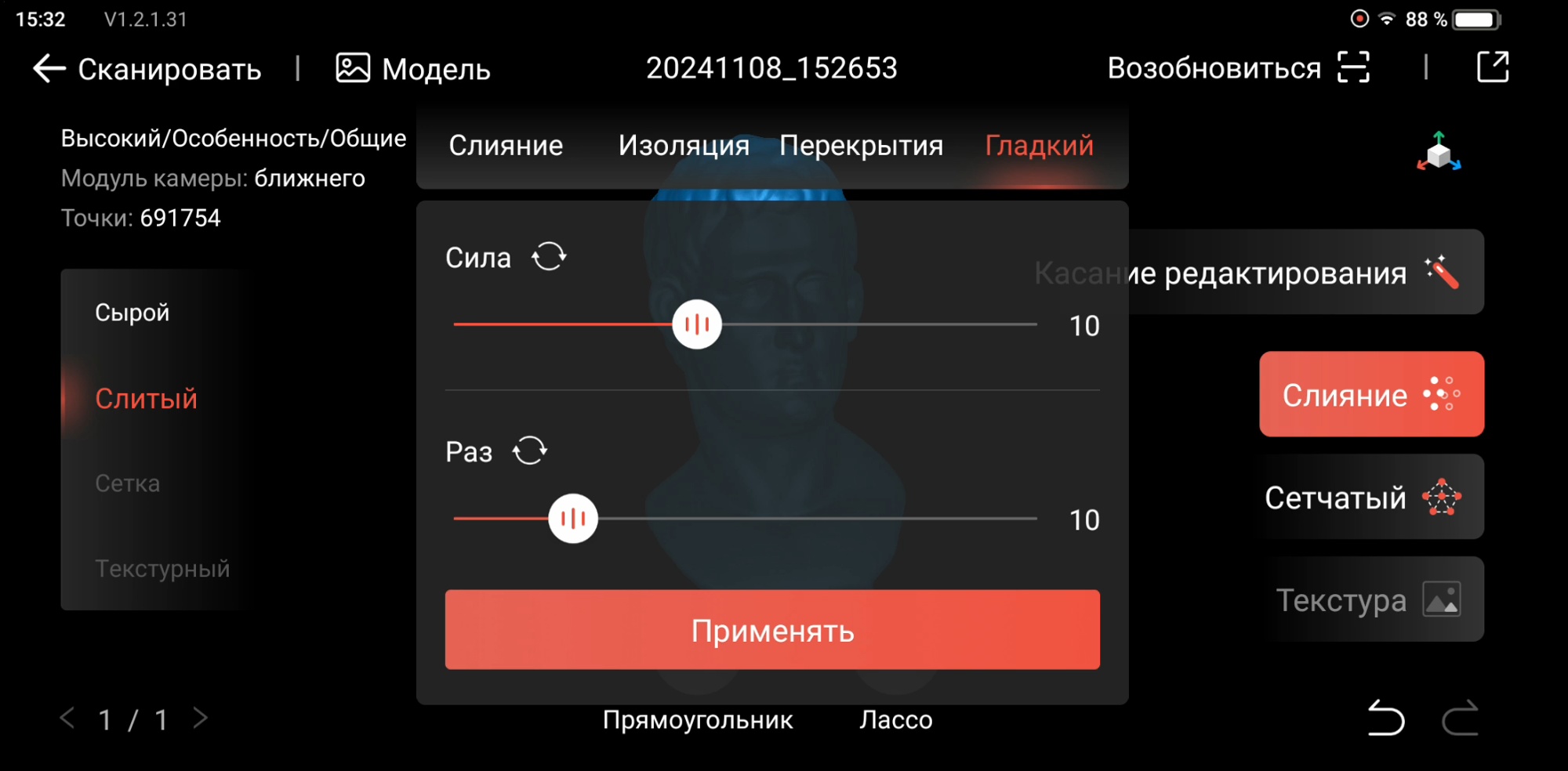
Перекрытие исправляет наложение слоев, но у меня они возникали крайне редко. Ну и сглаживание так же использую редко, т.к. оно «съедает» мелкие детали.
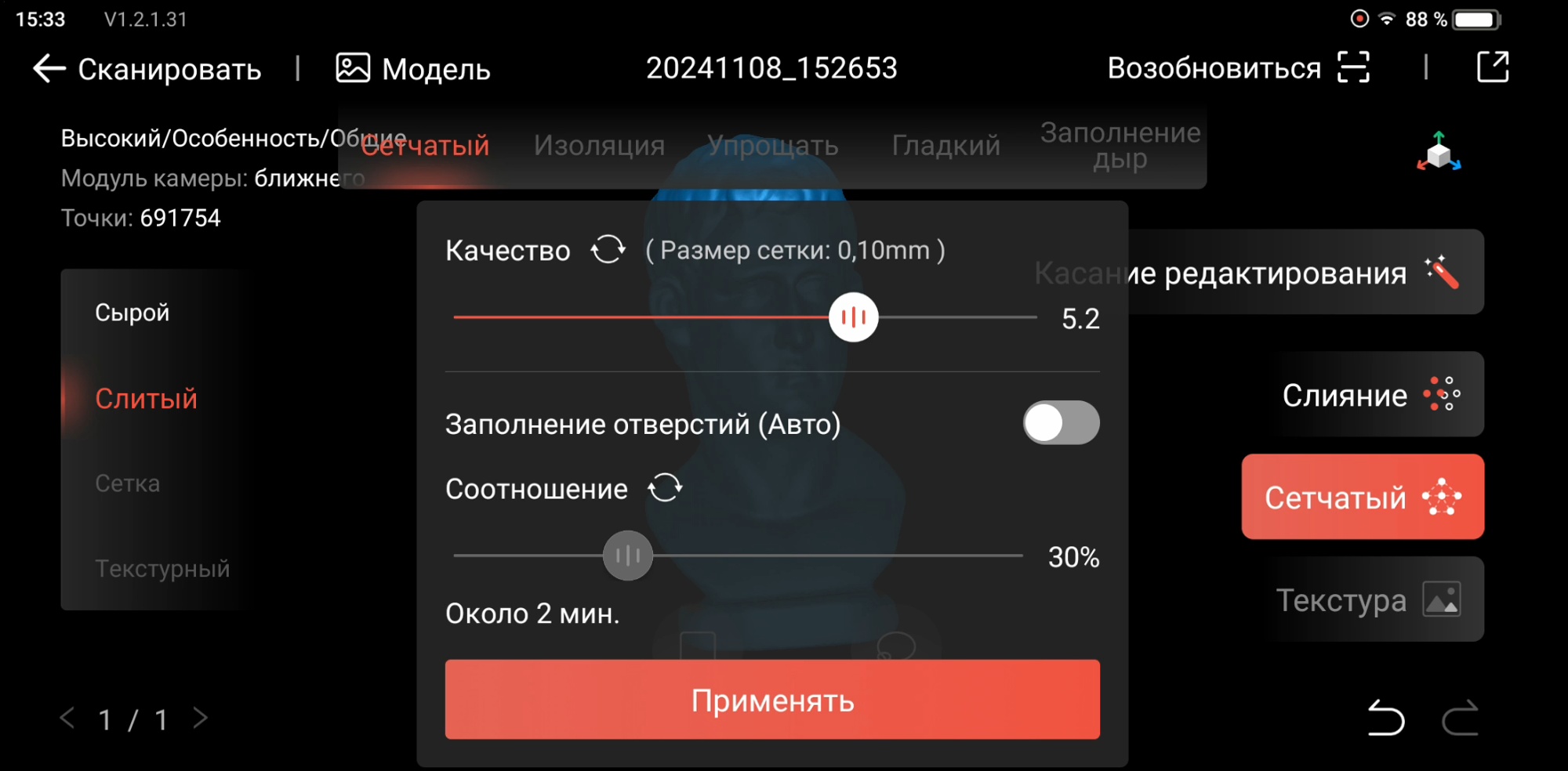
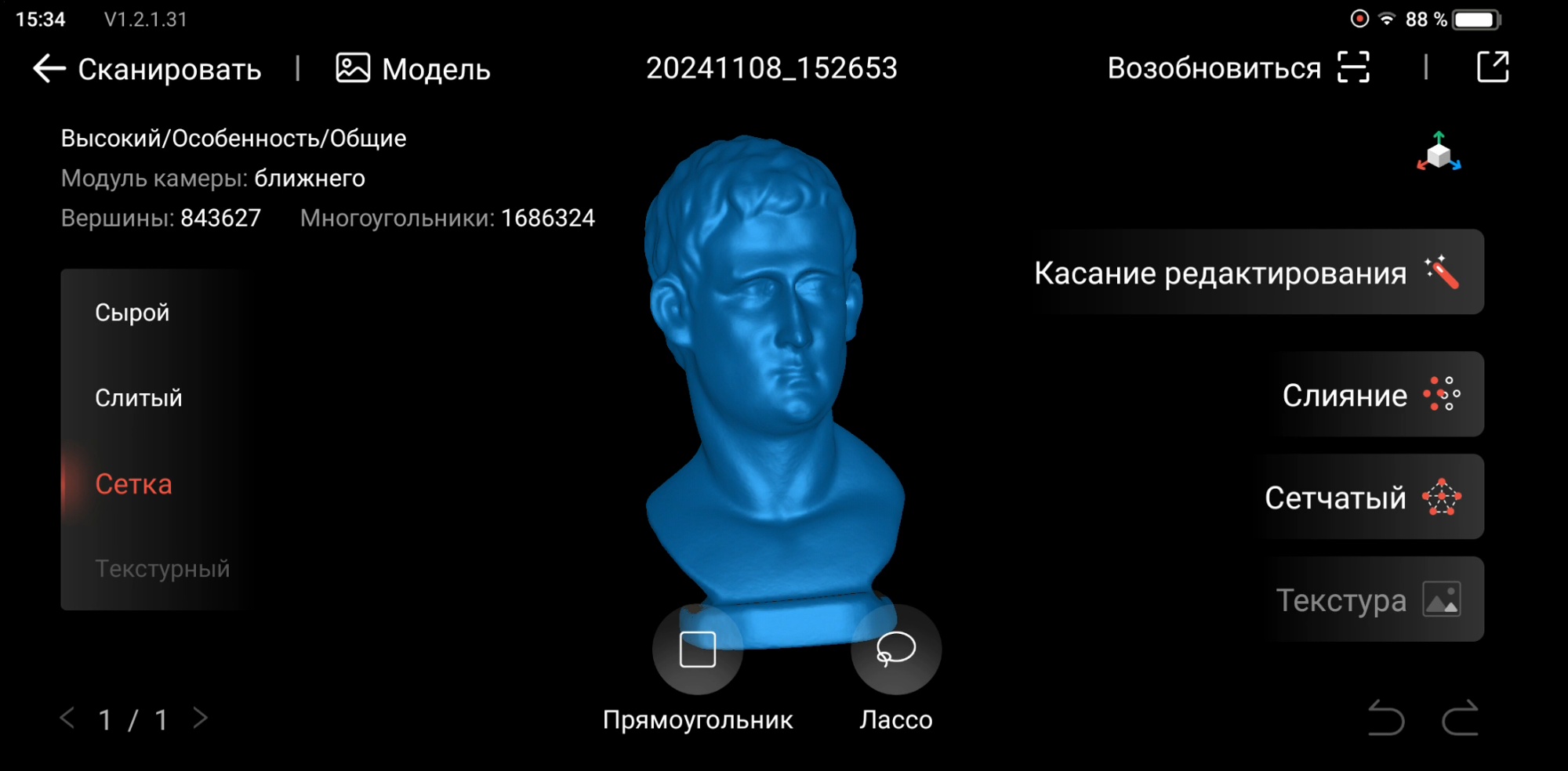
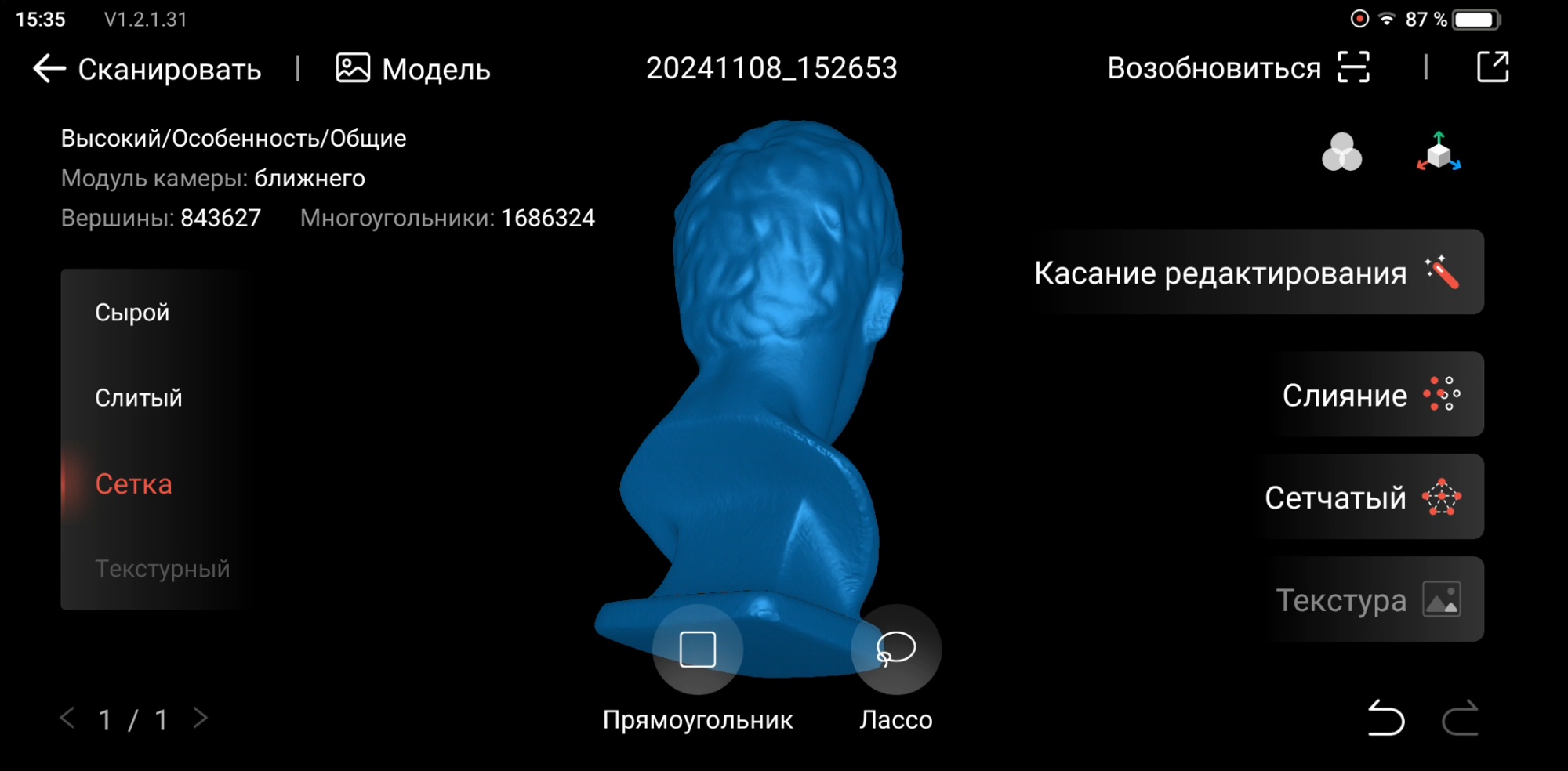
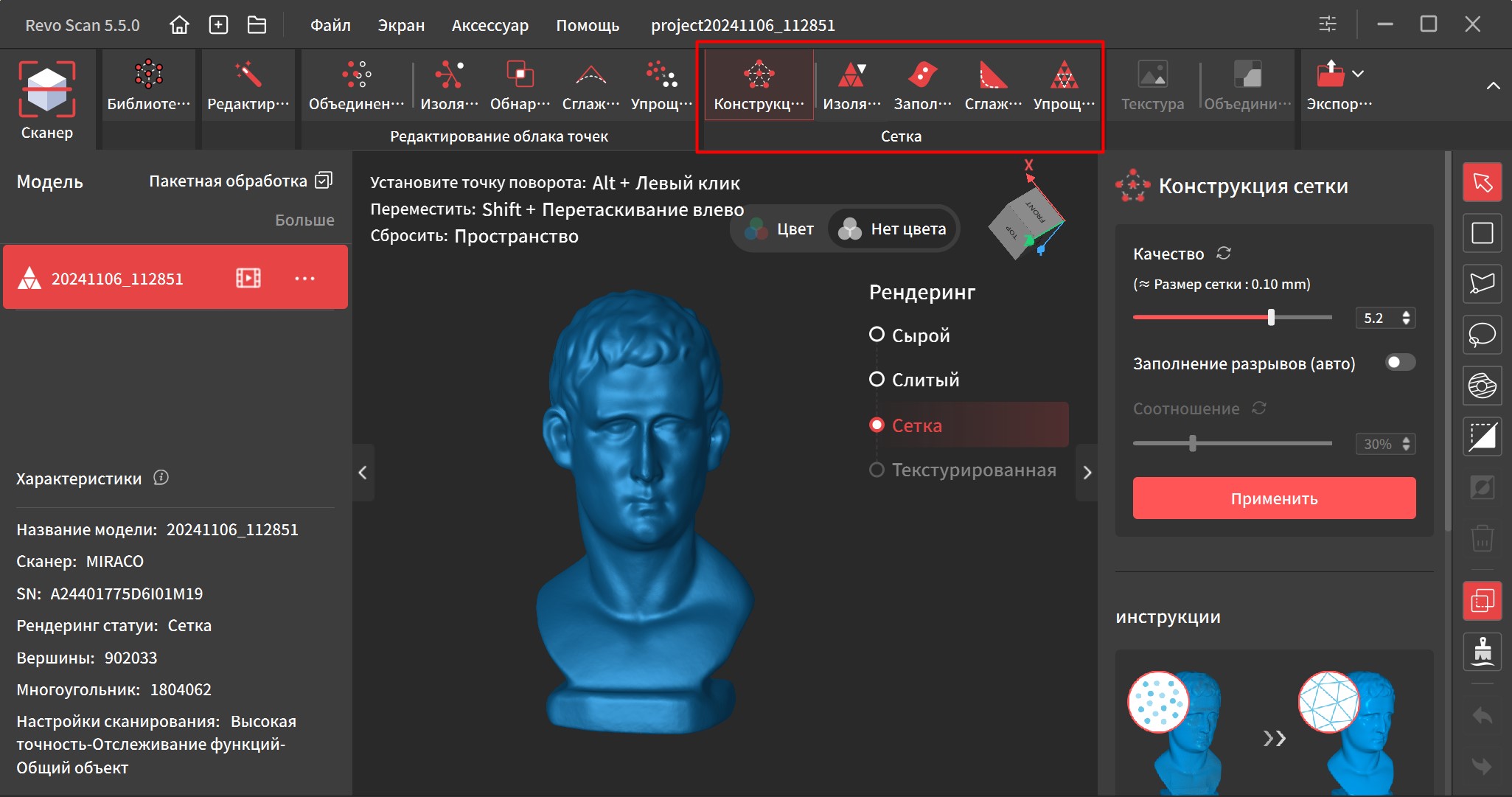
Казалось бы всё готово, модель выглядит точно так же, как исходная, но это только на первый взгляд. На самом деле сейчас поверхность состоит из одних только точек и для того, чтобы остальные программы воспринимали данный объект как целый, все точки нужно объединить в сетку. Делается это из одноименной вкладки, система так же предлагает оптимальный шаг, но его можно изменить вручную. В итоге из 690 тысяч точек, у нас получилось 843 тысячи вершин и полтора миллионов многоугольников, которые формируют поверхность одного объекта.
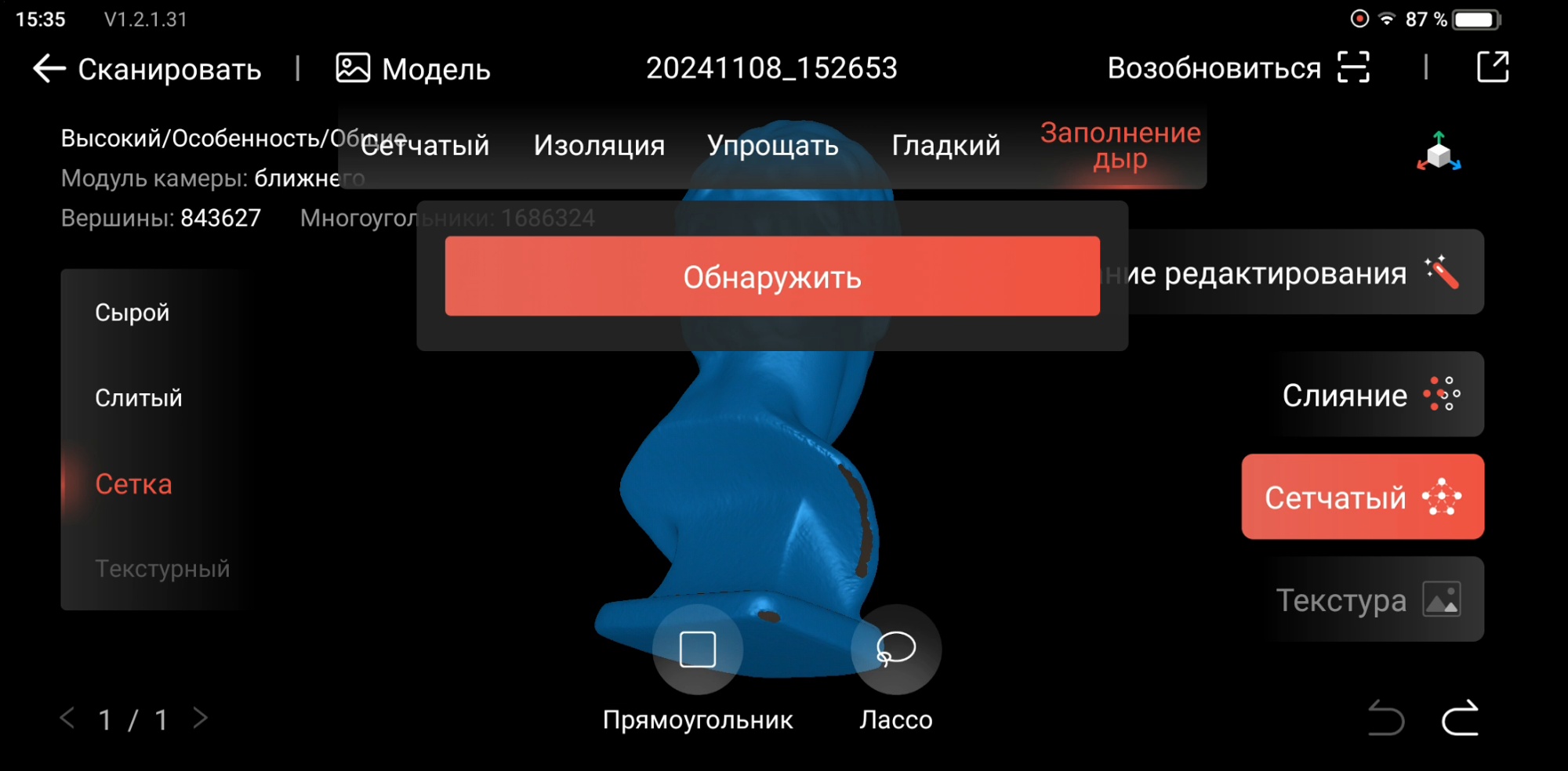
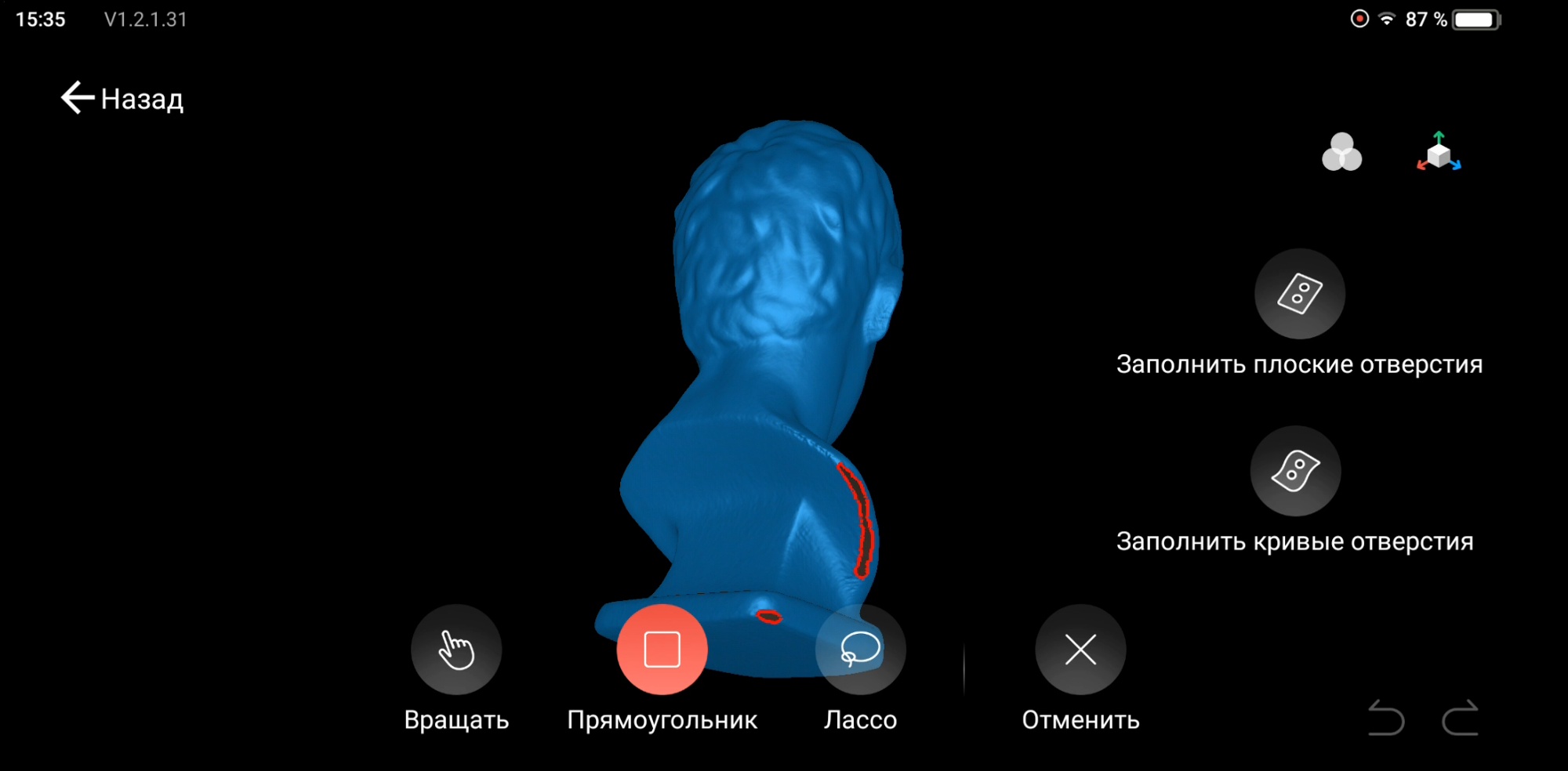
Как и в случае с обработкой точек, тут есть изоляция, а так же сглаживание и упрощение. А еще очень удобная опция заделывания дыр в зонах, которые не попали в поле зрения сканера. У меня это край одной грани, нужно был и на левый бок положить ненадолго бюст. Но не беда, алгоритм без проблем способен обнаружить и заполнить разрывы.
Если присматриваться, видно, что в этом месте участок получился не таким гладким, но пара мазков разглаживающей кисти легко исправит ситуацию и наша модель готова. Чтобы работать с ней далее, необходимо выгрузить данные на ПК. Для этого можно использовать кабель, либо домашнюю сеть Wi-Fi. Нажимаем «поделиться» в редакторе, либо в списке проектов.
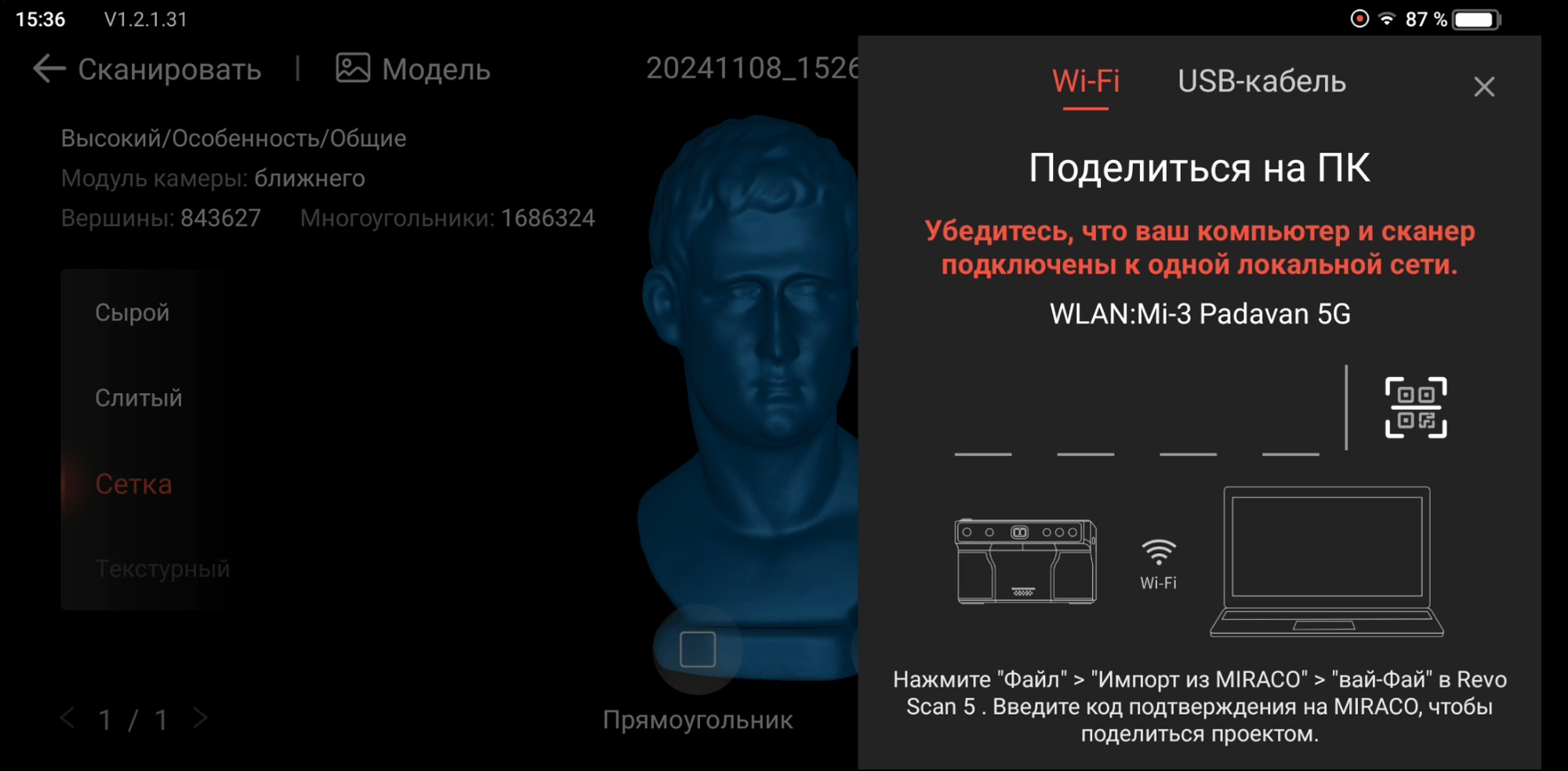
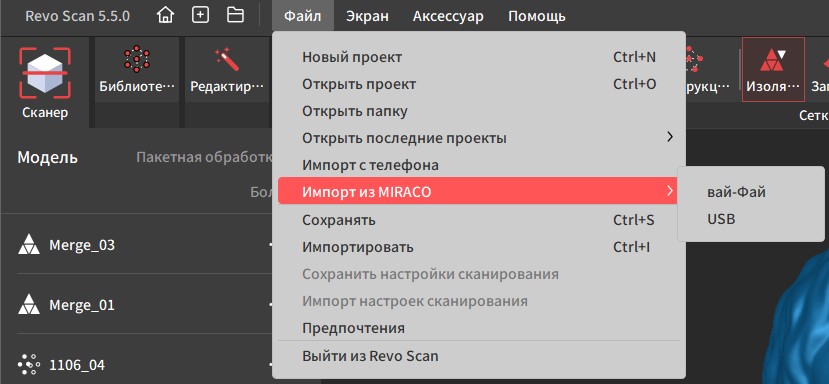
На ПК открывает Revo Scan, заходим в файл — импорт из Miraco. Лично мне удобнее использовать беспроводную сеть, тем более в диапазоне 5 ГГц скорость передачи данных отличная.
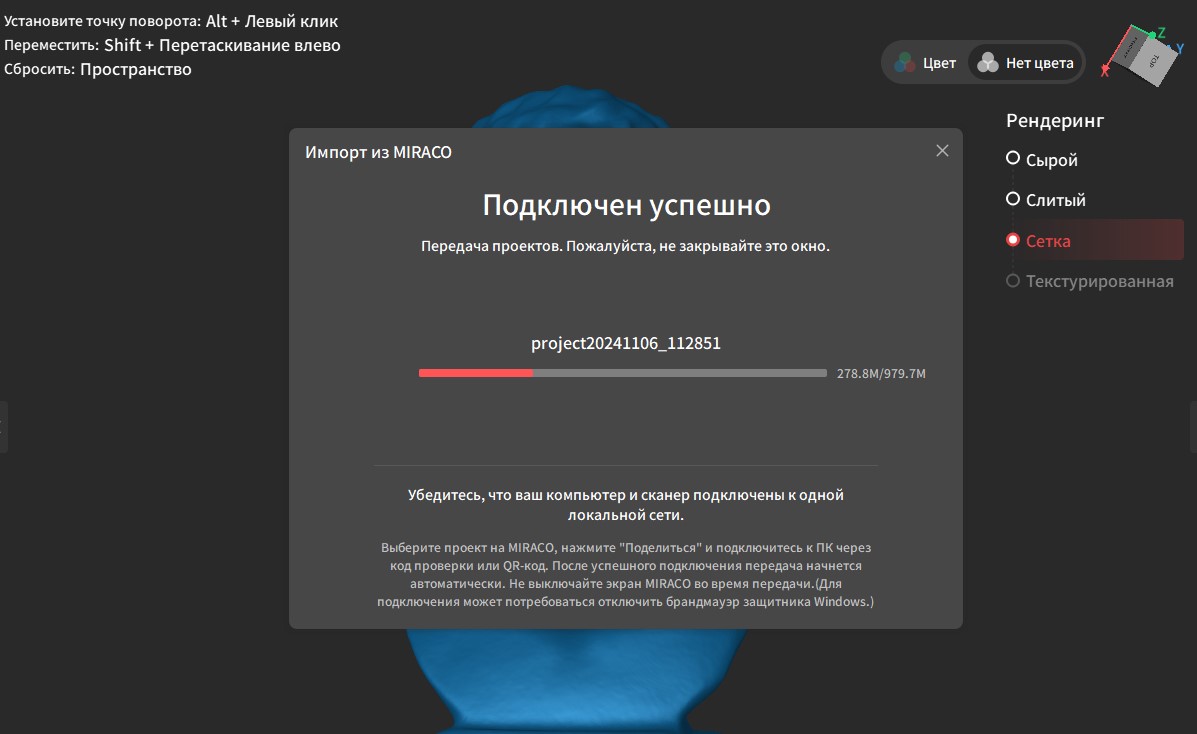
Вбиваем в сканере сгенерированный номер и ждём передачи готового проекта.

Интерфейс программы ПК
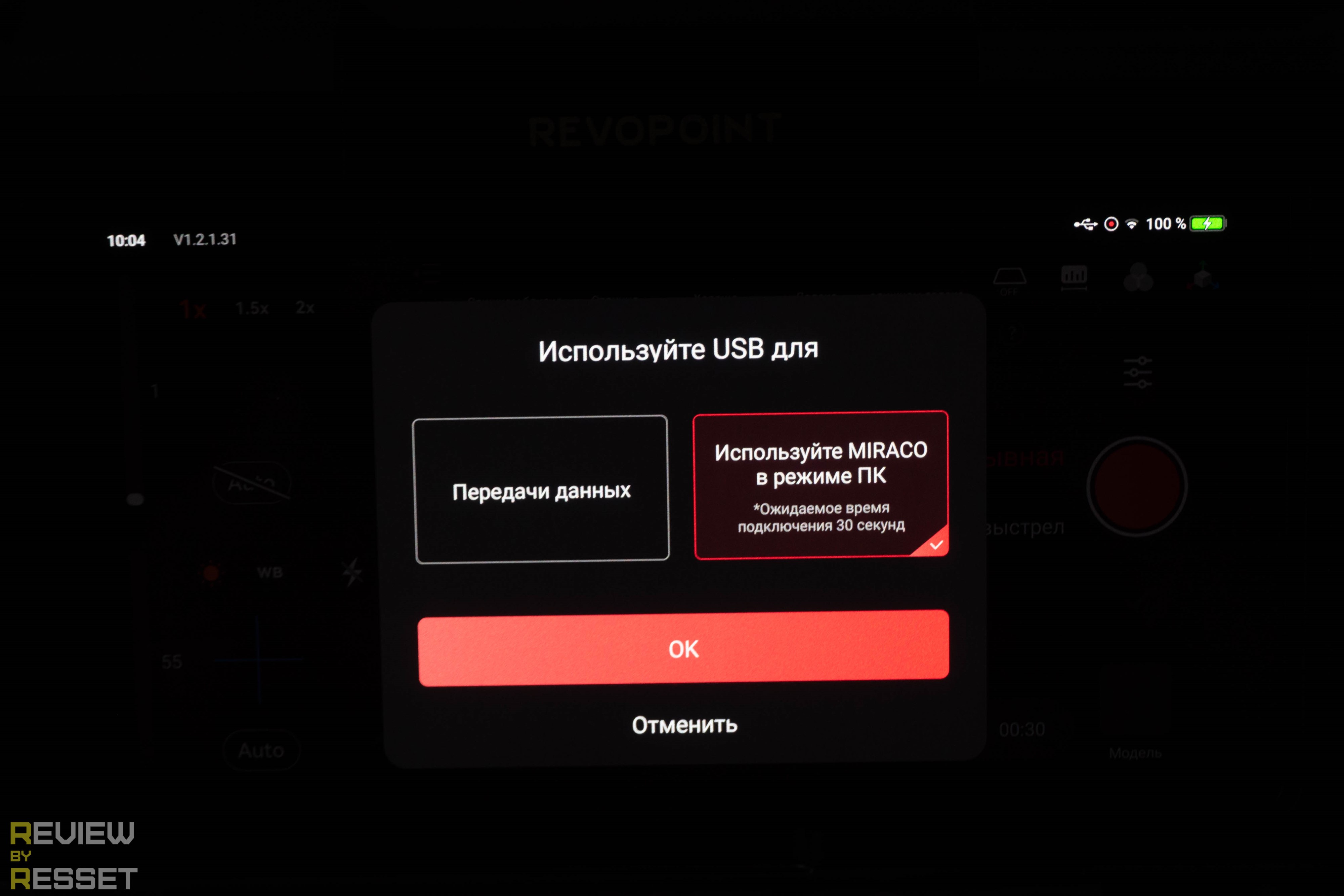
Если нужно сканировать небольшие объекты в кабинете, можно подключить сканер к компьютеру и ускорить процесс обработки, если конечно его конфигурация мощнее, чем у сканера. При подключении появляется диалоговое окно с выбором типа соединения.

По функциональности программа очень похожа, единственное, все элементы управления перед глазами, а не спрятаны во всплывающем меню.
Для наглядности отсканировал тот же бюст в тех же условиях с аналогичными параметрами.
Слева результат при подготовке на ПК, справа силами MIRACO. Хоть количество вершин немного и отличается, но я не вижу особой разницы. А вот по времени обработки разница конечно есть, раза так наверное в два-три. Что не удивительно, ведь в компе процессор 3 ГГц с 10 ядрами, 32 ГБ оперативки и RTX 4070, которая не особо напрягалась, но всё же принимала участие.

Для дальнейшего использования, деталь можно выгрузить из проекта в любом удобном виде и формате, будь то облако точек, модель из сетки или текстура.
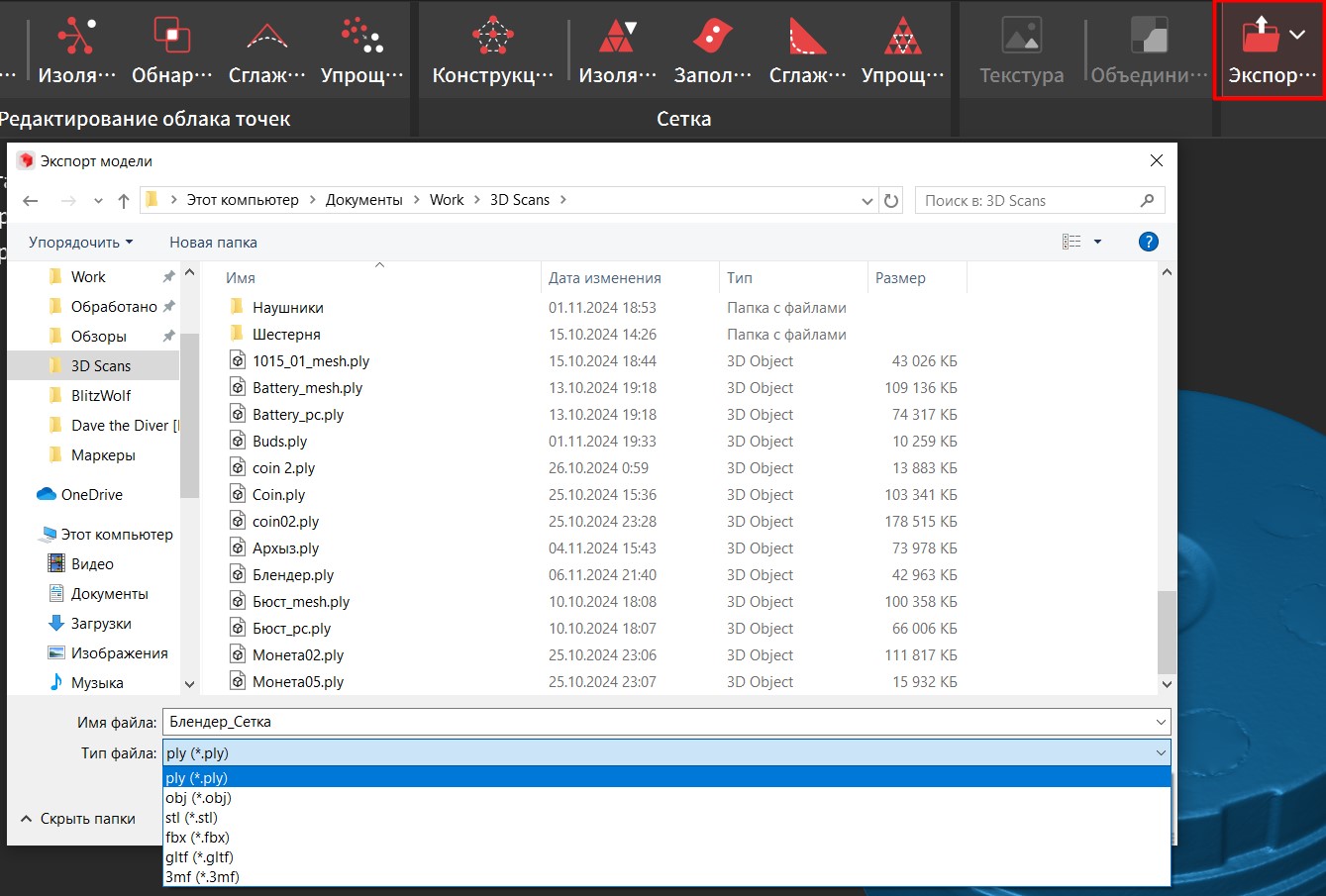
Stl или Obj файл можно сразу закинуть в слайсер и распечатать с помощью 3д принтера. С помощью фотополимерного получилась полная копия бюста, каждый изъян на своем месте.


Обратное проектирование
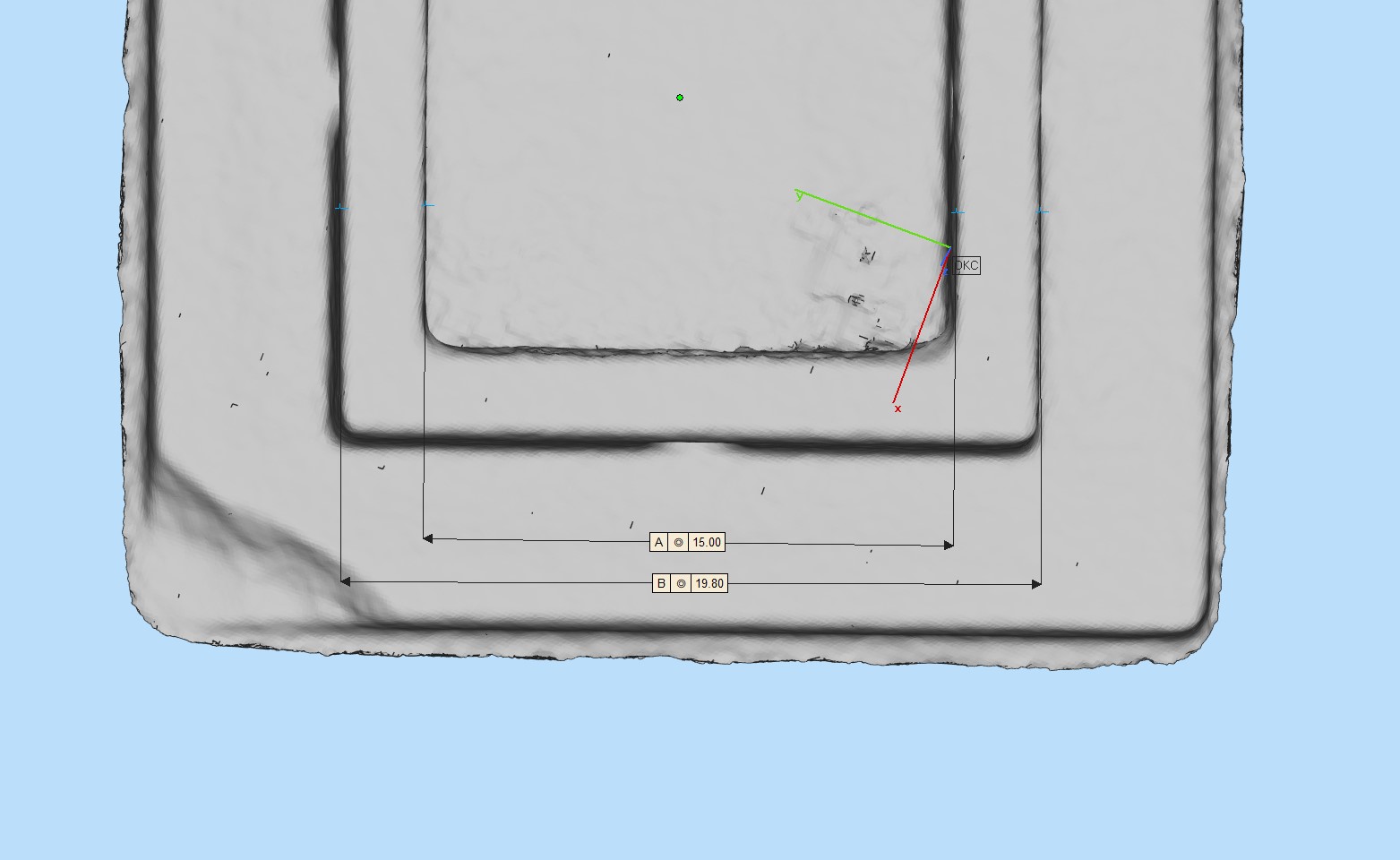
Для проверки точности я использовал вот такую небольшую пластину.


Внутренняя стенка сформировалась с точностью 50 микрон, внешняя 170 микрон. Размеры проставлял до того, как штангенциркулем промерил оригинал, так что данные не подгонял и возможно при измерении в других точках, показания будут меняться в лучшую или худшую сторону. В любом случае точность неплохая, а значит можно смело опираться на исходные данные при построении ответных частей.
Так, например, я делал ёмкость для блендера на замену разбитой на мелкие куски. Отсканировал основание, накинул сетку для формирования STEP модели, закинул её в солидворкс и опираясь только на эту геометрию, сформировал пустотелый цилиндр подходящего размера.
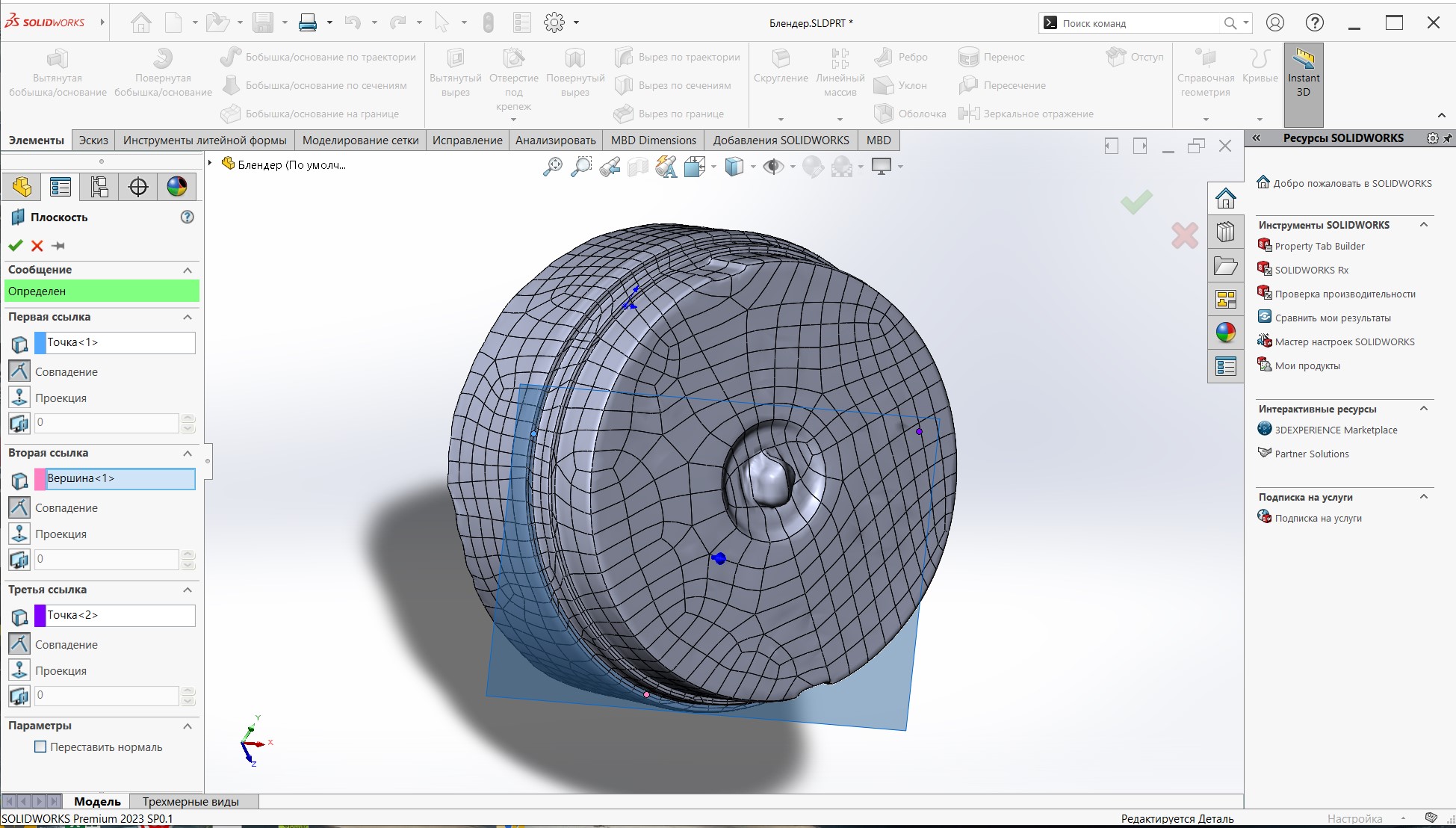
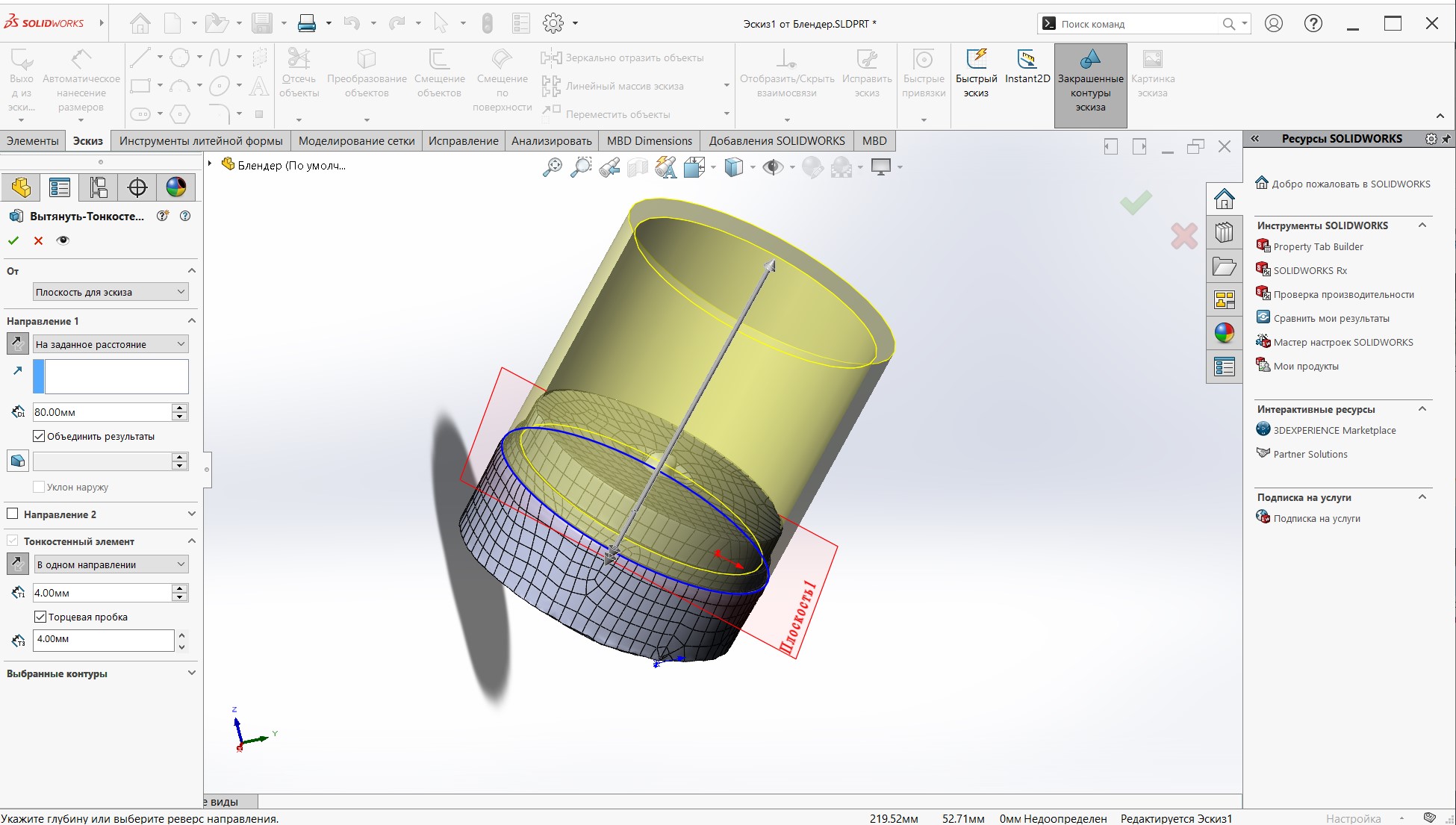
Далее вычитанием вырезал из него основание и получил пазы для стыковки двух частей. А потом я узнал, что есть инструмент «вырез», который в пару кликов может сделать то же самое с необходимым зазором )
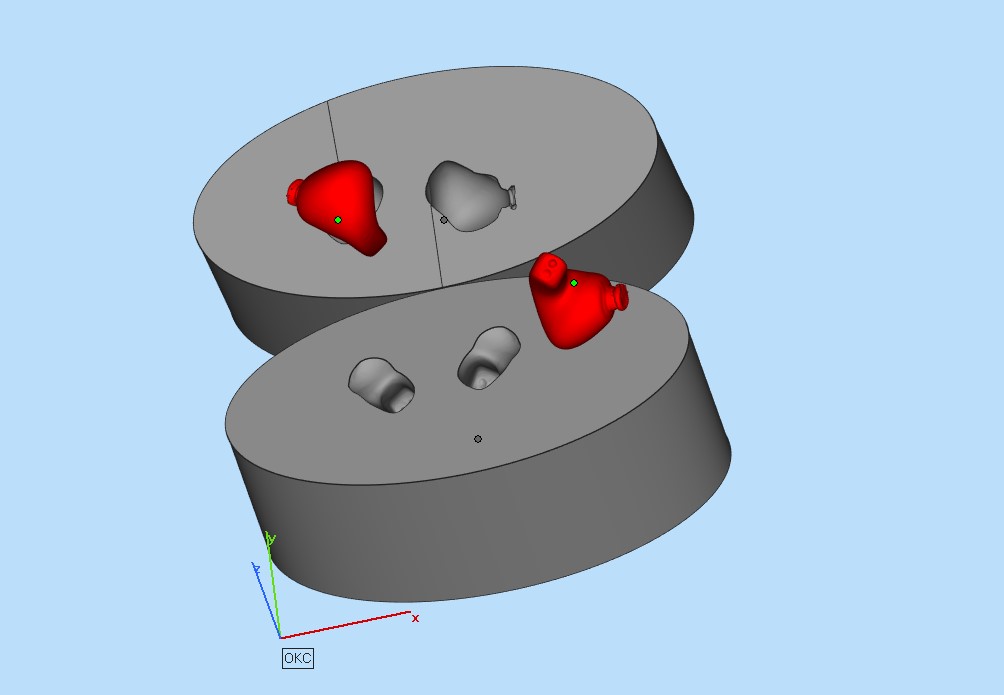
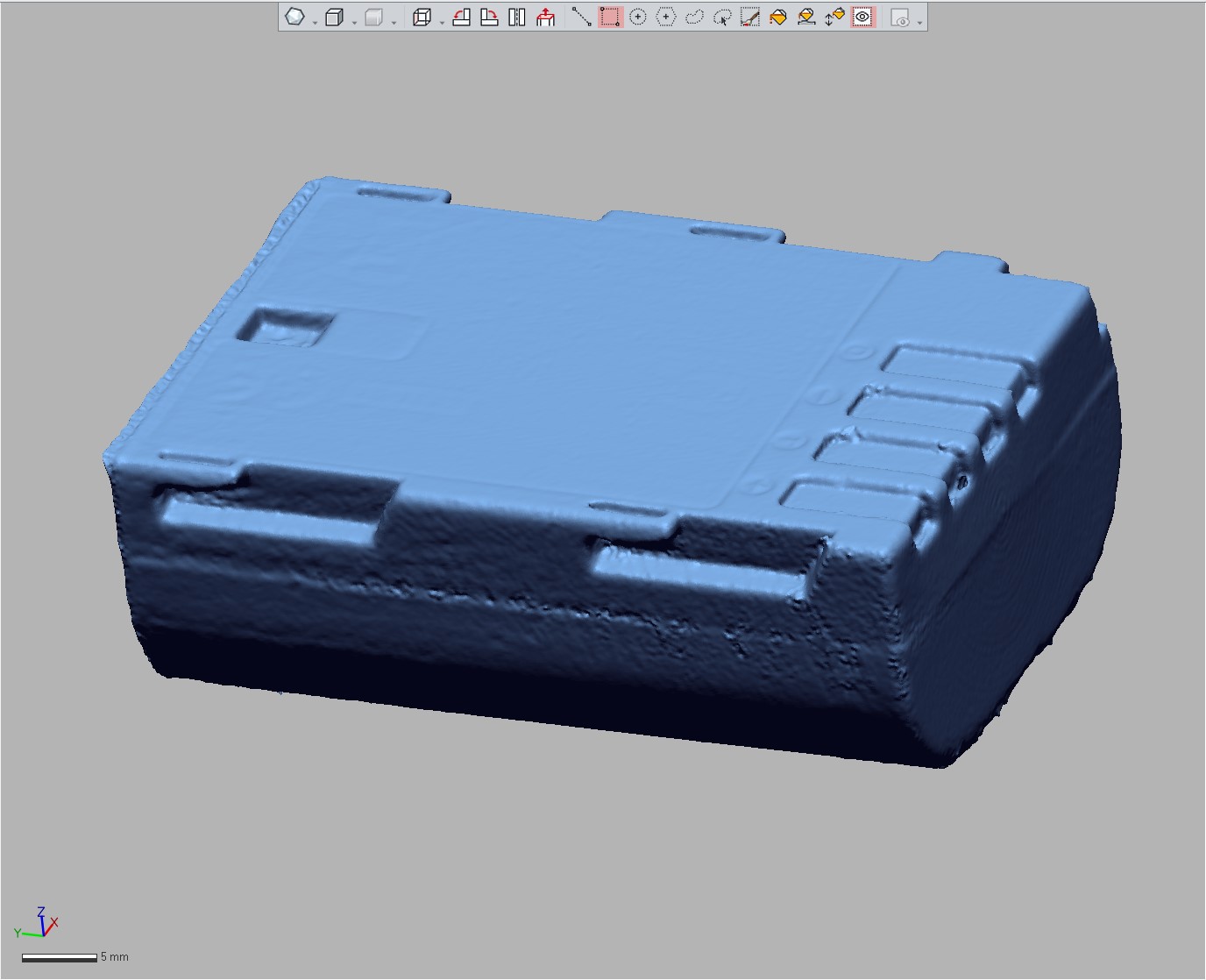
Справедливо был бы подметить, что подобную часть можно было и полностью вручную сделать, используя основание и штангенциркуль. Согласен, но то же самое можно повторить и с более сложными деталями. Например, у меня сломался кейс для TWS наушников. Такую форму я никогда своими руками не повторю, а сканер легко. В этот раз я пользовался маркерами.
В этом режиме нельзя переворачивать модель в процессе, т.к. привязка идет к точкам, а не к геометрии, так что я сформировал три отдельных детали, обработал их и слил в одну.
Благо, при достаточном количестве информации, объединение происходит в один клик. Очень удобно.
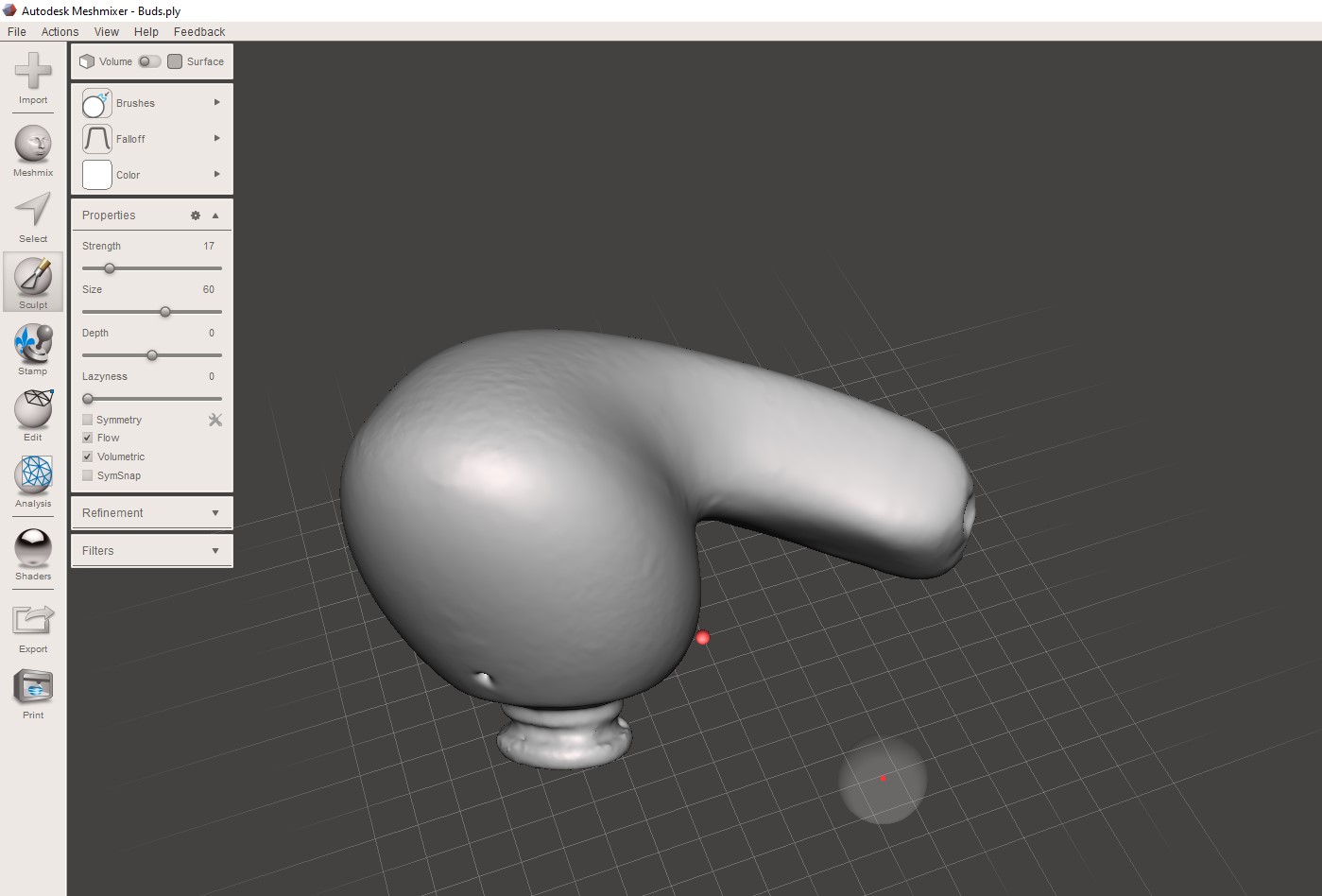
Не удержался и в мешмиксер разгладил поверхность, а так же подчеркнул отверстия.
Затем берем будущие заготовки, помещаем в них наушники и вычитанием вырезаем пазы для них. Пример визуально ужасный, т.к. статичная картинка плохо передает глубину, да и с формой самого кейса я особо не старался, но главное мысль донёс.
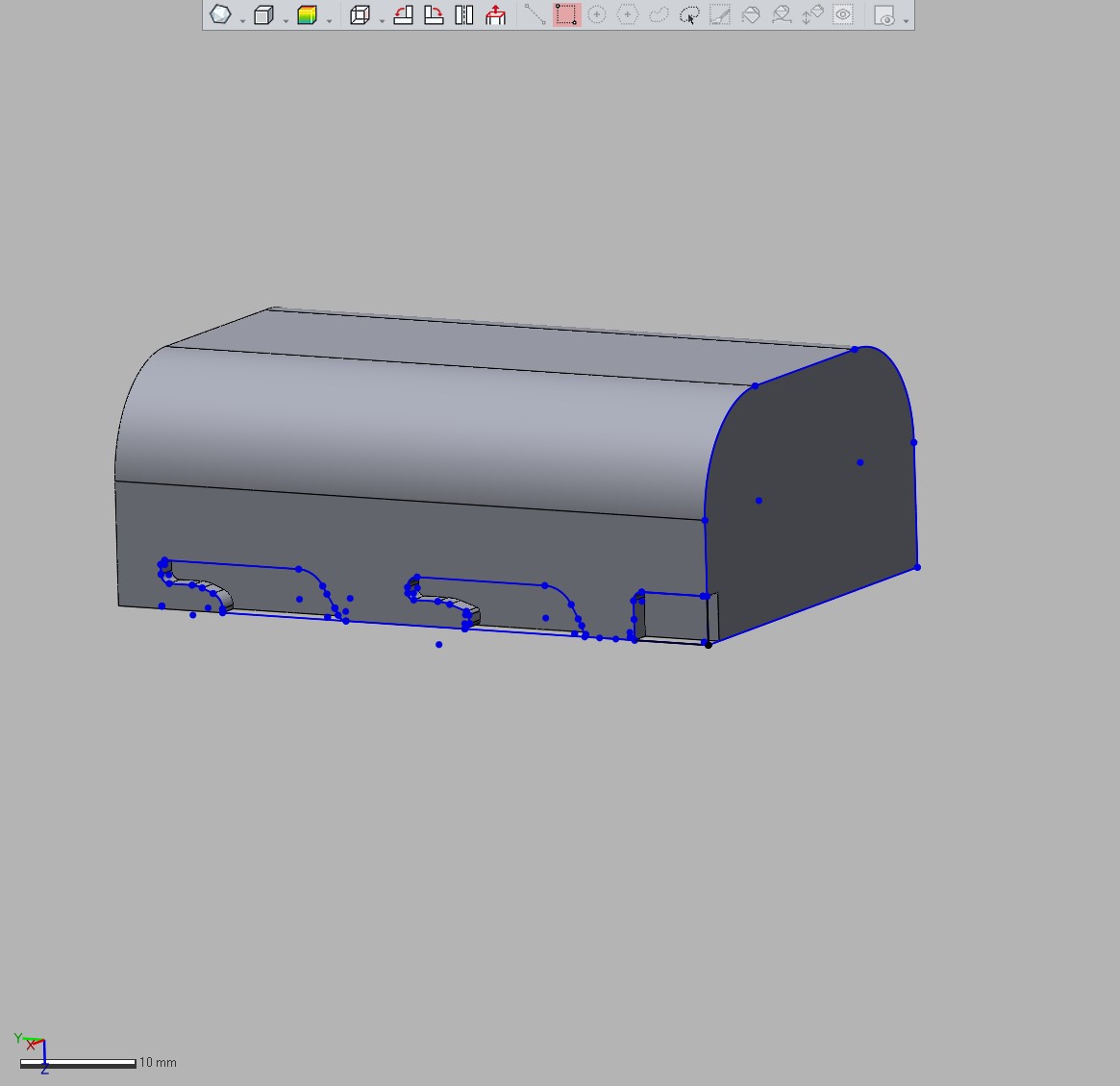
Для деталей средней сложности, можно использовать инструмент создания эскиза по сетке. Формируем срез с интересующей стороны на нужной глубине и получаем готовый эскиз.

После небольших правок неровностей, получается вполне неплохо.
Повторяем с нужных сторон и получаем полноценную модель с нуля без единого измерения. Во время проектирования я их конечно проставлял, но просто округляя сотые и тысячные доли.
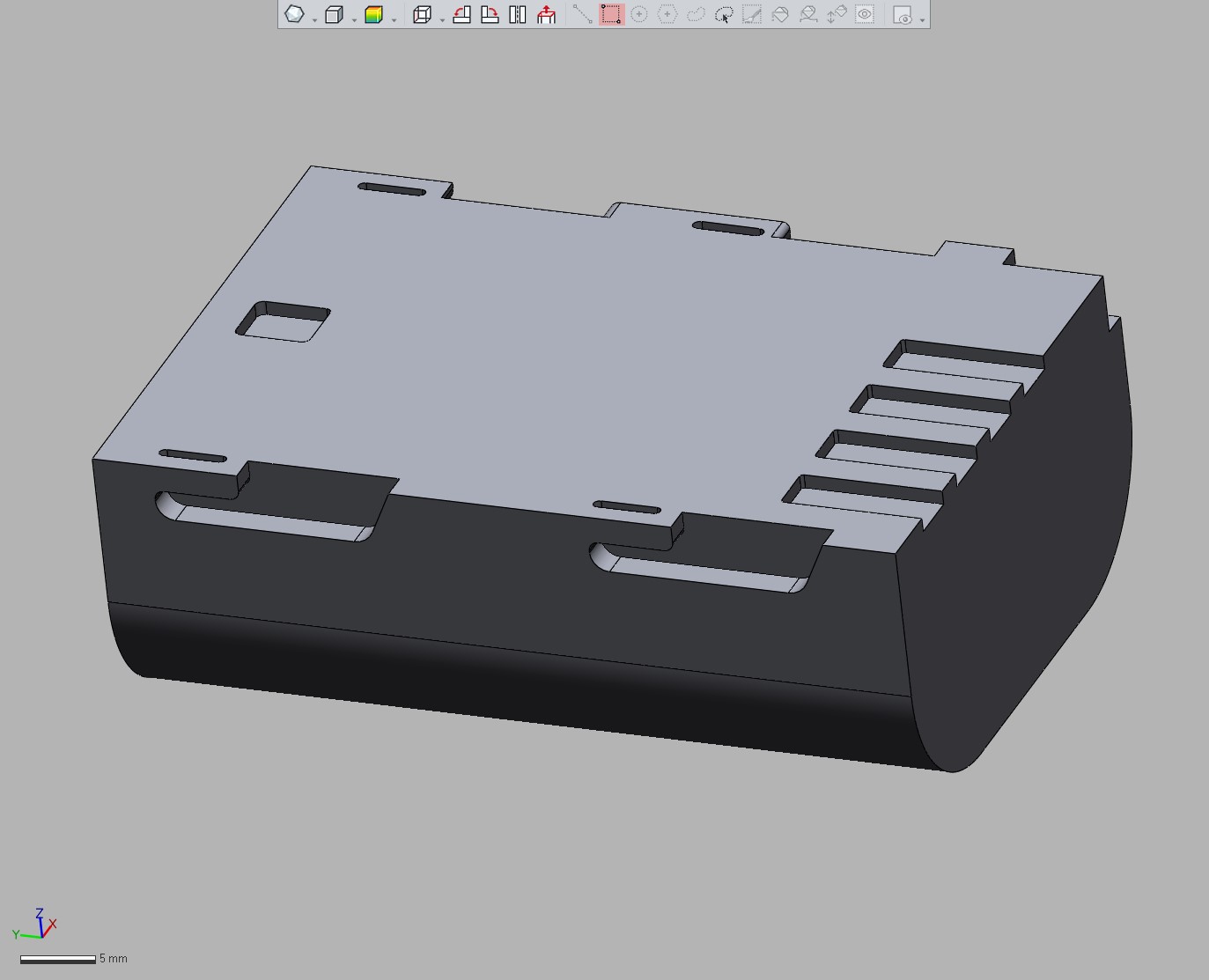
Результат получился вполне неплохой, всё входит и замечательно выходит.

Режим дальней дистанции
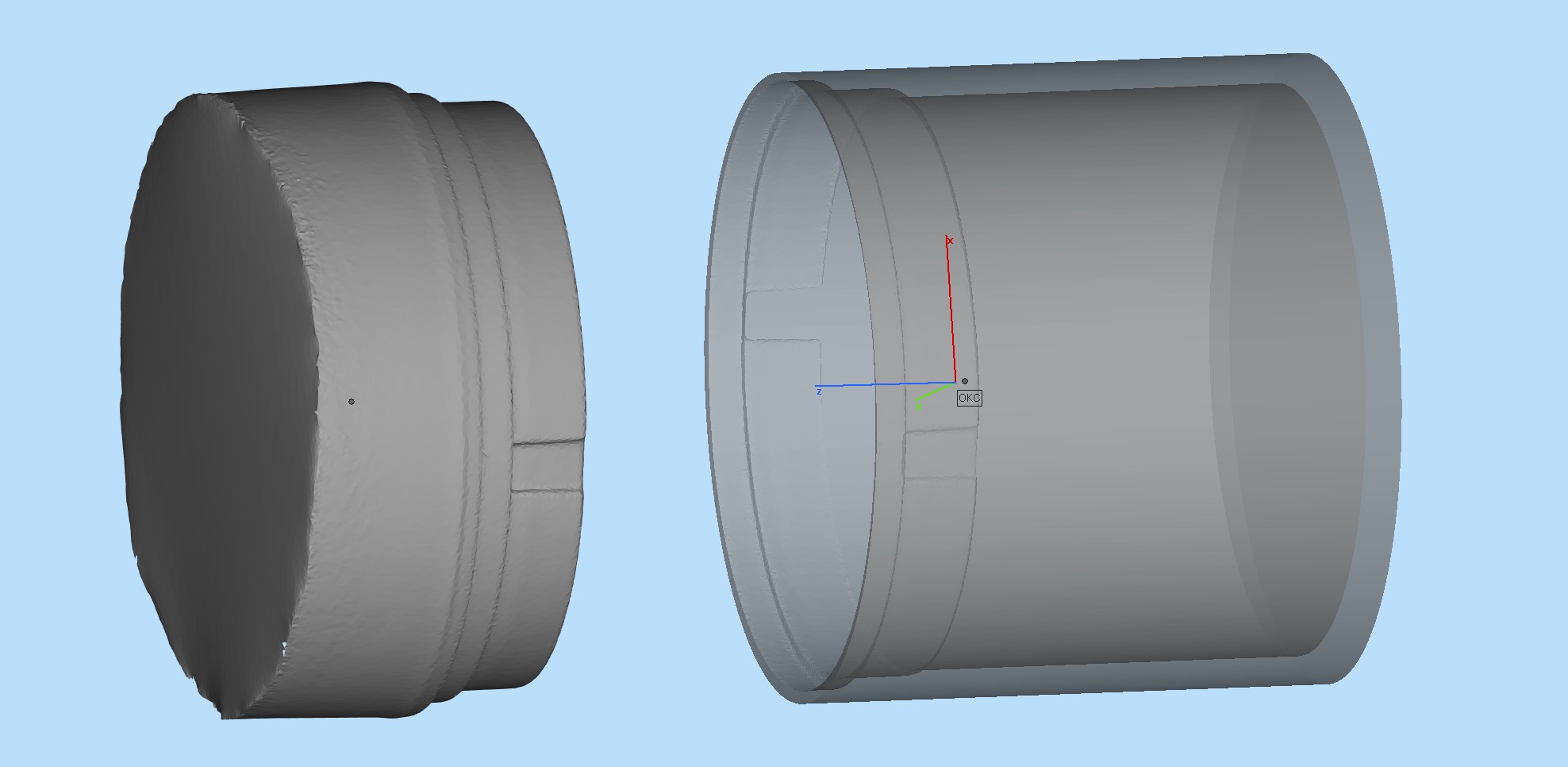
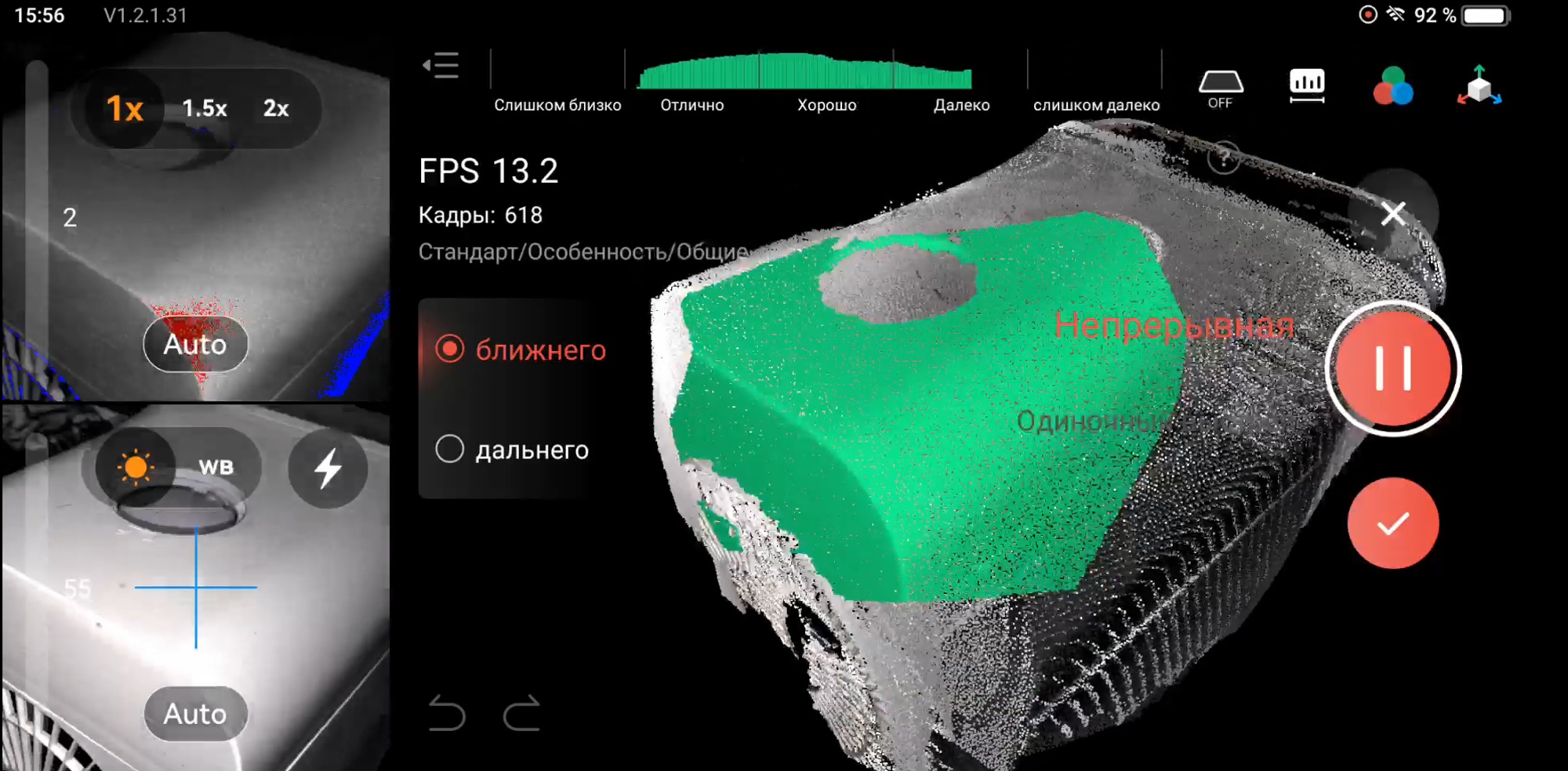
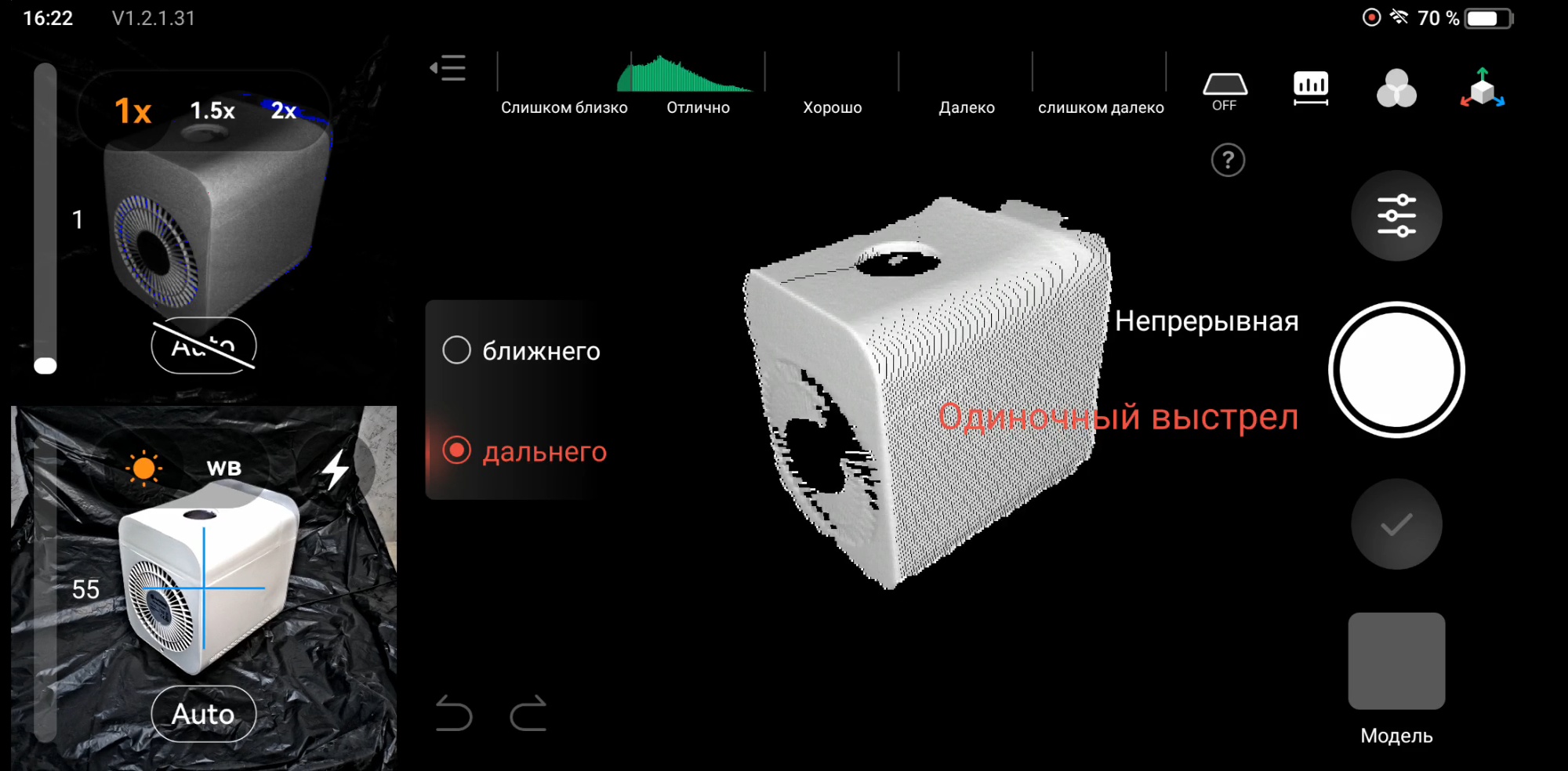
На фотографиях ниже пример минимальной дистанции сканирования при использовании разных пар сенсоров глубины.


Наличие двух режимов на самом деле очень удобная опция, т.к. объекты гораздо удобнее сканировать, когда они целиком помещаются в кадре. На левом фото показана активная зона захвата крупного корпуса на ближней дистанции. Из-за того, что его очертания плавные, под некоторыми углами алгоритм теряет геометрию и начинает сходить с ума, сдвигая элементы туда, где они не должны быть. На дальней дистанции весь вентилятор находится в кадре, сканер спокойно отслеживает его смещение по куче уникальных точек и без проблем формирует модель. Да, точность будет уже не от 50 микрон, а от 100, но для больших объектов это мелочи.
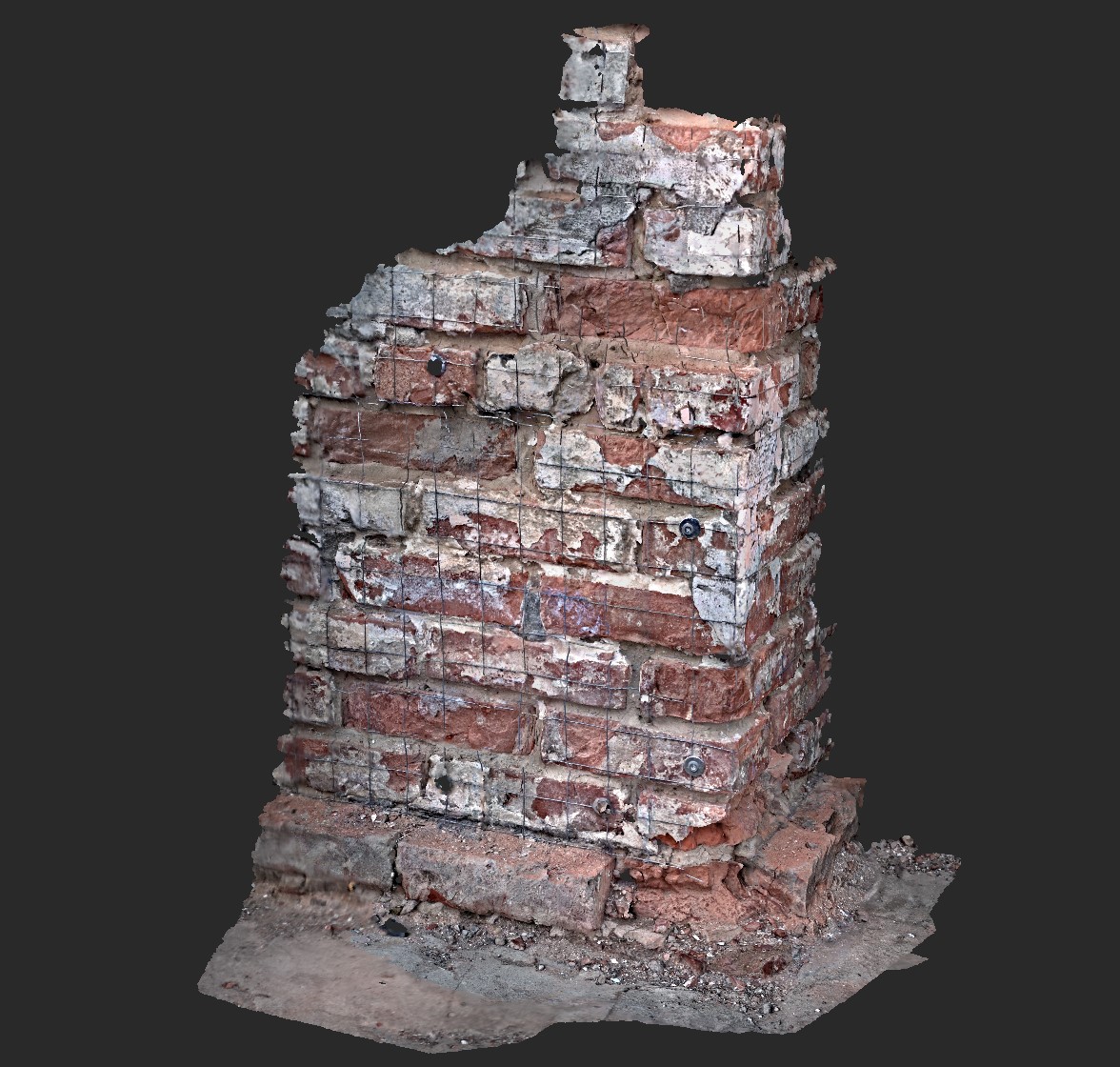
Но вентилятор еще можно было отсканировать кусками, используя маркеры, а вот что-то более крупное уже заняло бы гораздо больше времени. Например, угол стены, я отсканировал буквально за полминуты, просто размахивая руками перед ним.
После обработки получился вот такой результат.
Вот текстура крупнее.
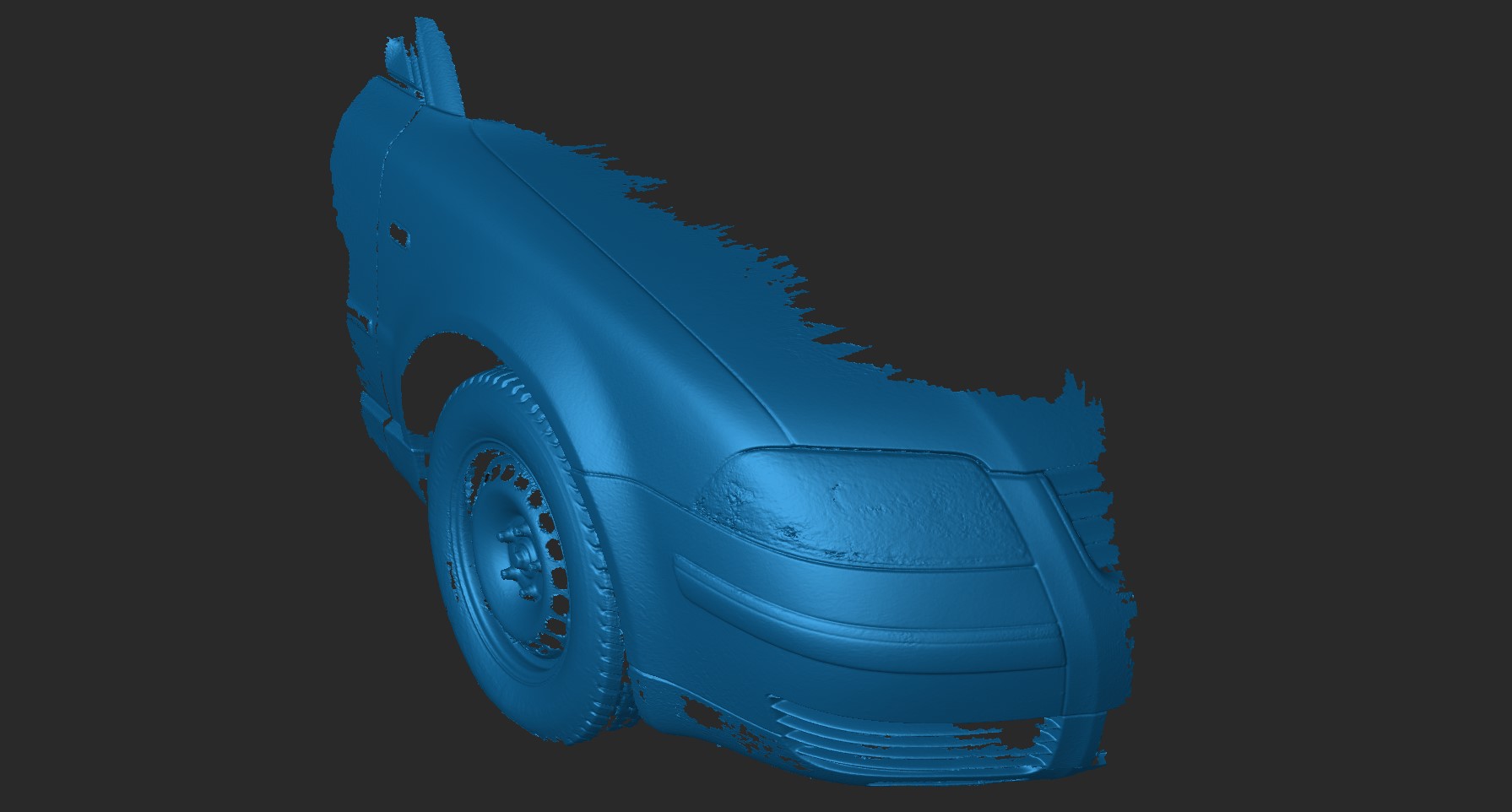
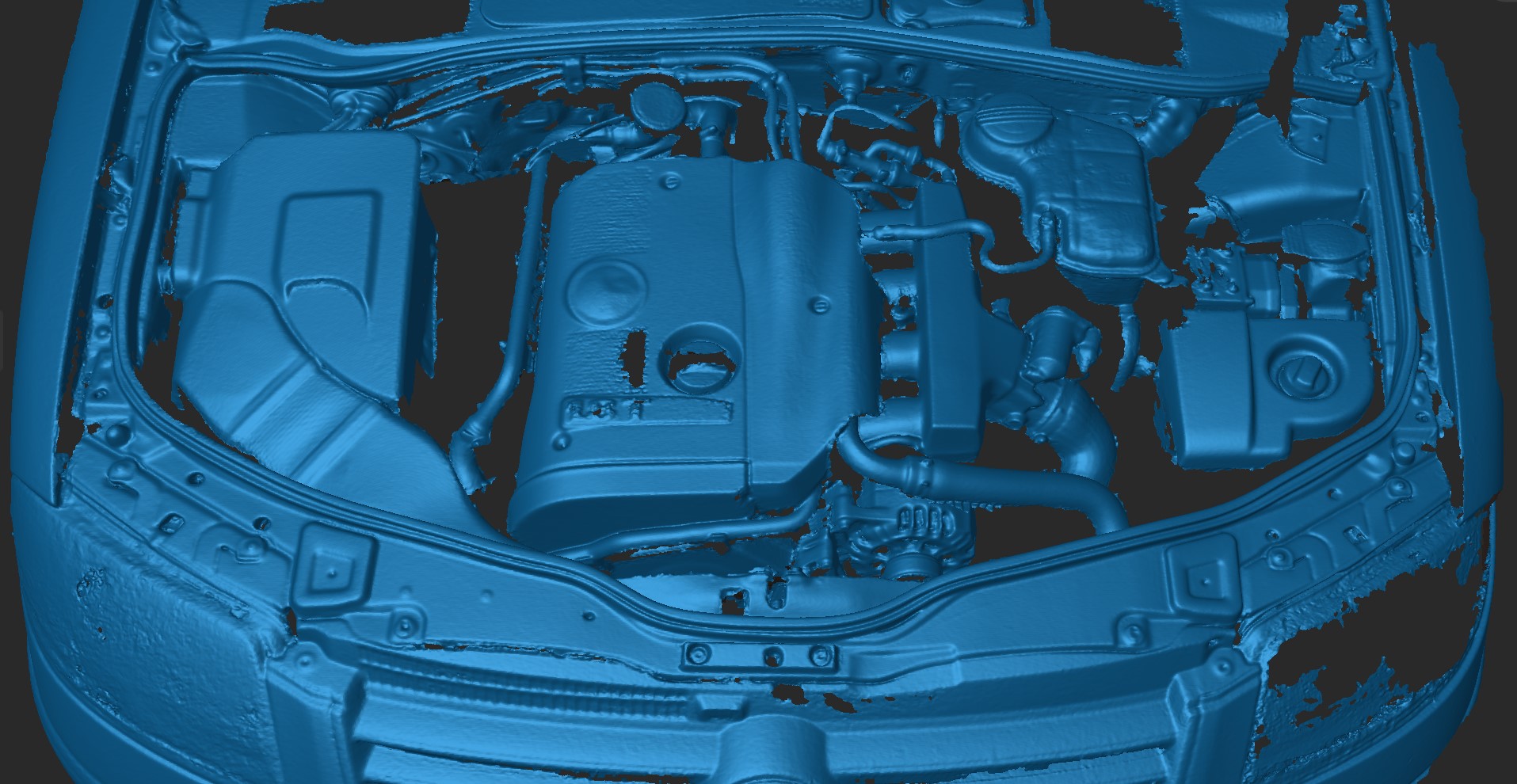
В режиме дальнего захвата и тёмные участки считываются лучше. Взять вот кузов авто, мало того, что он темный, так еще и глянцевый, но во время быстрого прохода, ошибок было минимум, в основном на решетке бампера.
Ну и вот что получилось. Как мне кажется, в какой-то степени помогла пыль, которая создала небольшой матовый слой на поверхности и если помыть кузов, результат будет хуже.
Начал искать более темные участки и залез под капот. Некоторые трубки с глянцевым покрытием срезало, но всё равно очень много деталей осталось в кадре.
И это я особо не задерживался на элементах, к тому же «на лету» можно переключаться на ближнюю дистанцию и выделать нужные элементы.
Ну и куда без котиков. Новая игрушка привлекала много внимания, так что пришлось дождаться, пока котик заснет.
Если честно, думал вместо тёмных участков шерсти будут дыры, но получилось неплохо.

Автономность
Как и указано в описании, встроенного аккумулятора хватает где-то на 2 часа работы, чего вполне хватит на десяток проектов без обработки и на 1-2 с получением финального результата. Благодаря поддержки PD протокола, зарядка происходит очень быстро, так же можно полноценно пользоваться устройством в процессе.

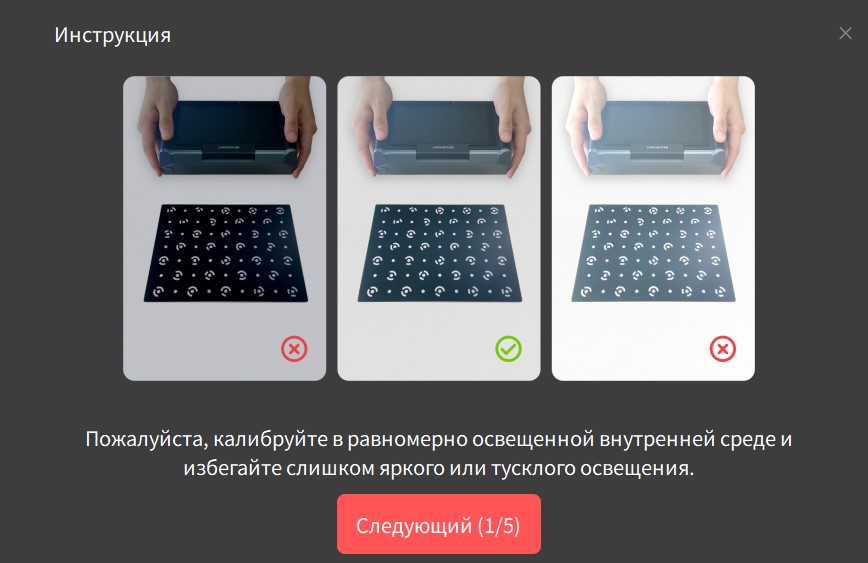
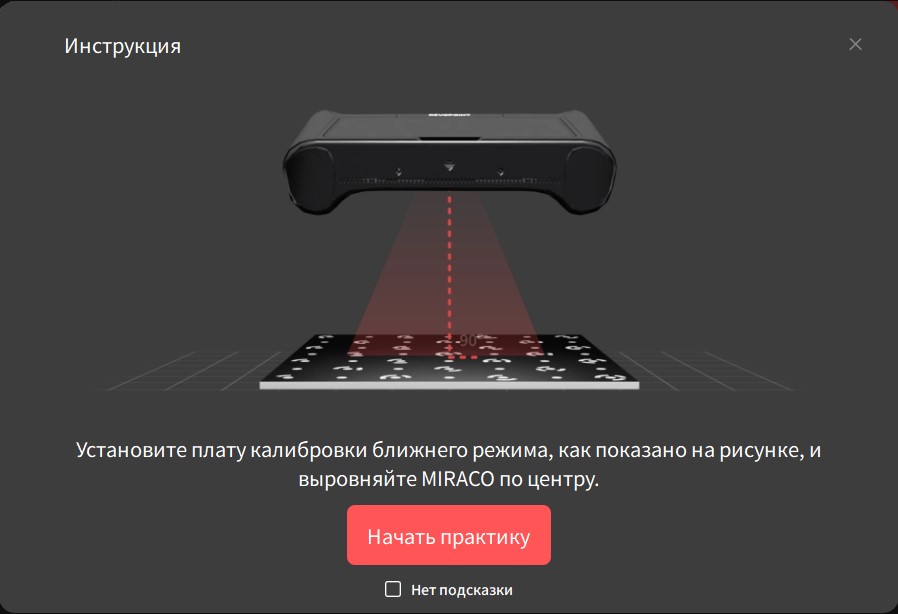
Полная калибровка точности
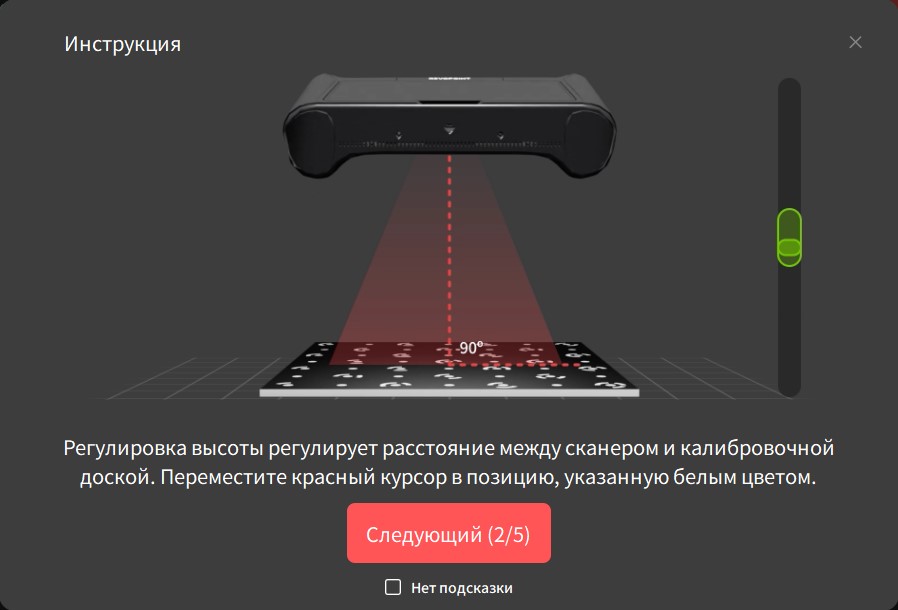
Если вам кажется, что сканер совершает ошибки при формировании модели, есть смысл провести полную калибровку оптической системы. Для этого нам понадобится калибровочная панель, которая шла в комплекте и программа Revo Scan для ПК. На стартовом экране в левом нижнем углу есть кнопка калибровки, после нажатия на которую появится окно с подсказками.
Нужно будет наклонять и поднимать корпус на определенную высоту, следуя советам на экране. Запаситесь терпением, ступеней будет более десятка.


Итоги
+ Это первый полностью автономный сканер, которому не нужна розетка для питания и компьютер для сбора и обработки данных. А ведь не каждый ПК или ноутбук осилит просчет большого количества облаков точек или построение плотной сетки.
+ Эргономику продумали хорошо, корпус выглядит приятно и в руке лежит комфортно, для откидного экрана не пожалели качественную AMOLED матрицу, а для переноски и хранения есть удобная сумка.
+ Работа на ближней и дальней дистанции, по сути данная модель включает в себя два сканера: Pop 3 и Range 3 с соответствующей этим моделям детализацией.
+ Благодаря ИК проектору, подсвечиваются и относительно тёмные участки, которые игнорировались при использовании структурированного синего света в предыдущих моделях. Особенно это заметно на дальней дистанции.
Купить Revopoint MIRACO можно в официальном магазине Aliexpress.Дополнительная ссылка на случай если основная не будет работать.
Если Вам нужна максимальная точность за свои деньги, рекомендую обратить внимание на модель MINI 2. Как понятно из названия, она предназначена для сканирования небольших объектов, но зато на выходе получается отличная детализация:
3D сканирование это просто: подробный обзор Revopoint MINI 2
Если в строках выше у Вас не отображаются ссылки, значит их порезал Ваш блокировщик рекламы. Отключите его временно для ознакомления с полной информацией )











9 комментариев
Добавить комментарий
Жаль я из 3Д печати ушел. Когда занимался, очень не хватало подобных инструментов.
Если покупать как инструмент для постоянной работы, то он окупается. Не всегда быстро, но окупается. Поэтому такой сканер надо рассматривать как еще один инструмент, и как инвестицию.
К тому же он дает возможность экономить время и браться за многие заказы которые без сканера просто не скопировать (вручную выводить округлости и формы, это прям боль)
Добавить комментарий